
All About – Pick and Place Robot
 पिक एंड प्लेस यकीनन आजकल सबसे अधिक बार होने वाला रोबोटिक्स एप्लिकेशन है और निश्चित रूप से लोकप्रिय है। वे आज के विनिर्माण और औद्योगिक वातावरण में बड़े पैमाने पर उपयोग किए जाते हैं।
पिक एंड प्लेस यकीनन आजकल सबसे अधिक बार होने वाला रोबोटिक्स एप्लिकेशन है और निश्चित रूप से लोकप्रिय है। वे आज के विनिर्माण और औद्योगिक वातावरण में बड़े पैमाने पर उपयोग किए जाते हैं।
एक पिक एंड प्लेस रोबोट, जैसा कि नाम से ही स्पष्ट है, किसी वस्तु को जल्दी से एक स्थिति से उठा सकता है और दूसरी स्थिति में छोड़ सकता है। वे दोहराए जाने वाले कार्यों का ध्यान रखते हैं जो मनुष्यों के लिए सांसारिक और बोझिल होते हैं। विनिर्माण और अन्य उद्योगों में उत्पादों का निरीक्षण, परिवहन और पैकेजिंग उत्पाद उनके कुछ ही काम हैं।
Advantages of Pick and Place Robot
AI अब पिक एंड प्लेस रोबोट के कुछ फायदों पर एक नजर डालते हैं।
- Accuracy: रोबोट के सबसे भरोसेमंद पहलुओं में से एक इसकी निरंतरता और सटीकता है जो वे प्रदर्शन करते हैं। ऐसा इसलिए है क्योंकि मानवीय त्रुटि के लिए कोई जगह नहीं है। उनके पास सटीकता का एक स्तर है जो मानव असेंबली से मेल नहीं खा सकता है।
- Speed: मनुष्यों की तुलना में, पिक-एंड-प्लेस रोबोट तेजी से काम करते हैं और प्रक्रिया को तेज करते हैं। इसके अलावा, जैसा कि यह मनुष्यों को प्रतिस्थापित करता है, यह उन्हें अधिक जटिल कार्यों पर ध्यान केंद्रित करने की अनुमति देता है, जिसके परिणामस्वरूप उच्च उत्पादन दर होती है।
- Flexibility: वे हर मांग को पूरा करने में सफल होते हैं क्योंकि उनके पास अनुप्रयोगों की एक विस्तृत श्रृंखला होती है, चाहे वह विधानसभा कार्य हो या वस्तुओं की डिलीवरी।
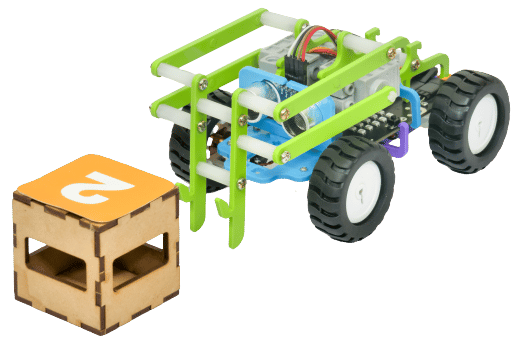
Assembling the Robot
हम क्षैतिज रोबोट से शुरुआत कर रहे हैं।
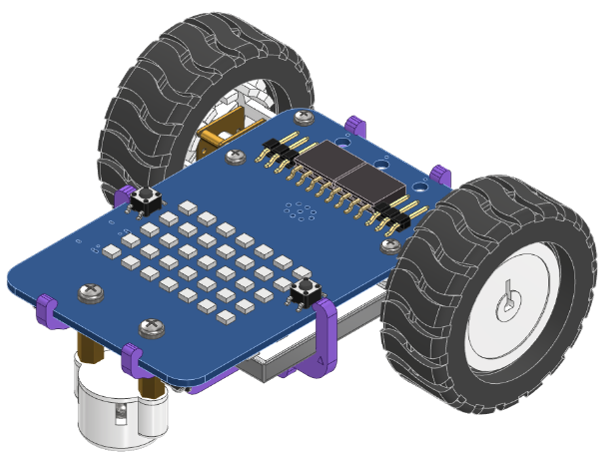
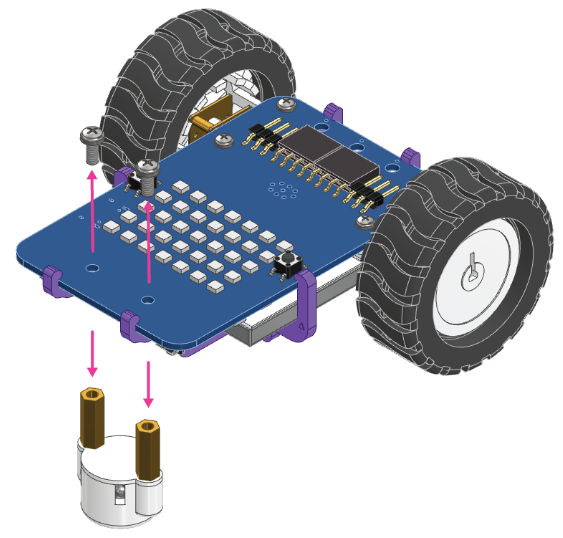
- सबसे पहले, बोल्ट को हटाकर कैस्टर व्हील को Quarky रोबोट से अलग करें ।

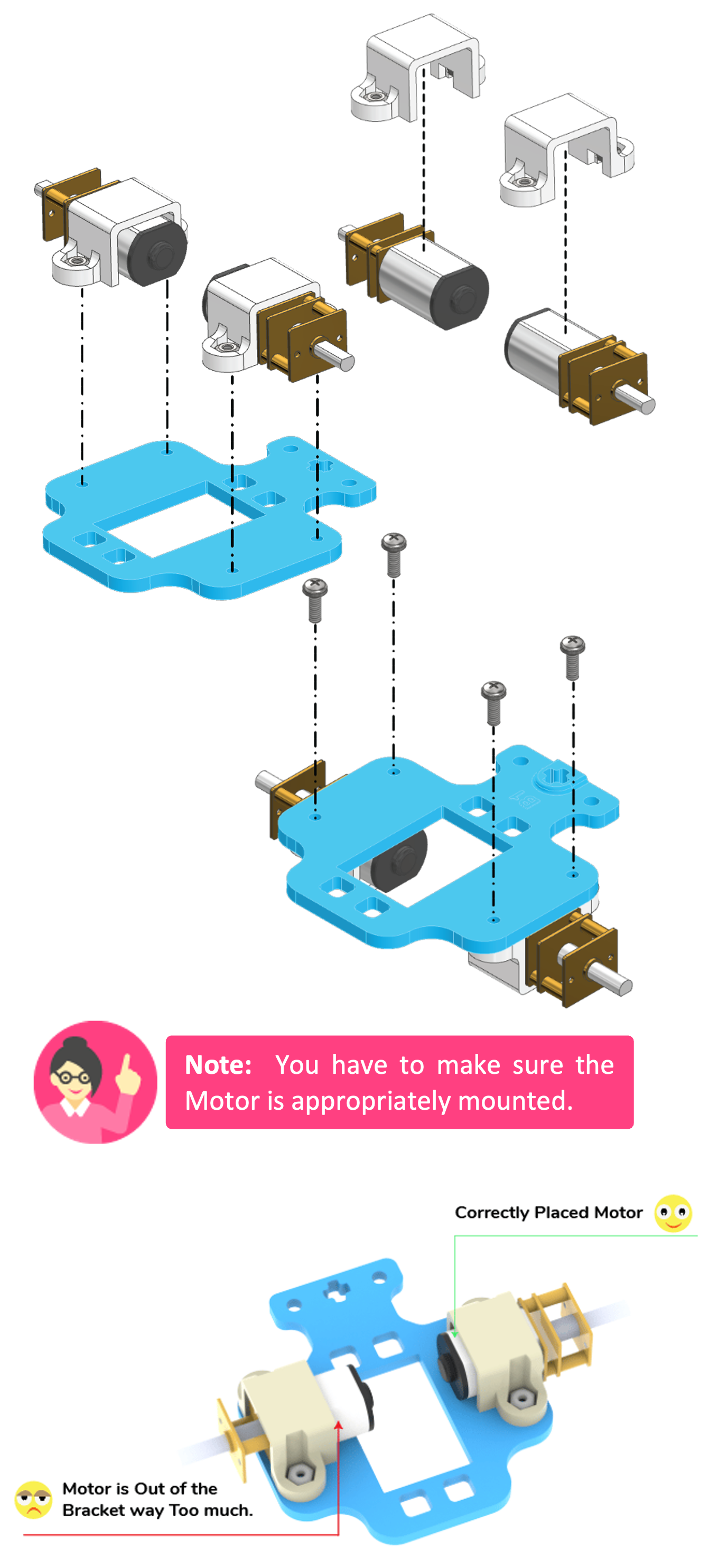
- जगह मोटर माउंट ब्रैकेट का उपयोग करके B1 प्लेट के शीर्ष पर स्थित मोटर्स । M2 बोल्ट और M2 नट का उपयोग करके इसे बांधें जो आपको मोटर्स के साथ मिलता है।

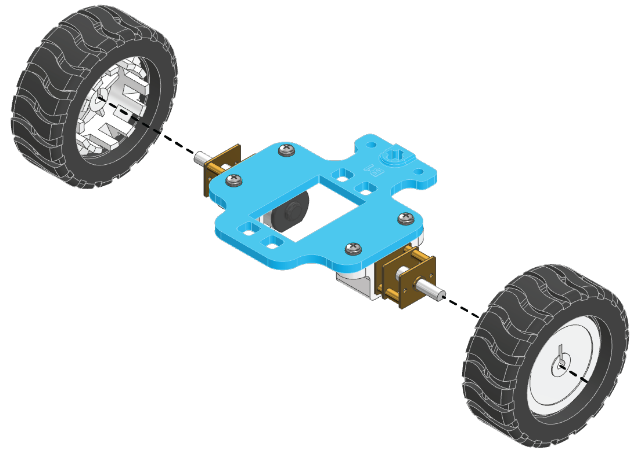
- अब संलग्न करें मोटर्स के लिए पहिए ।

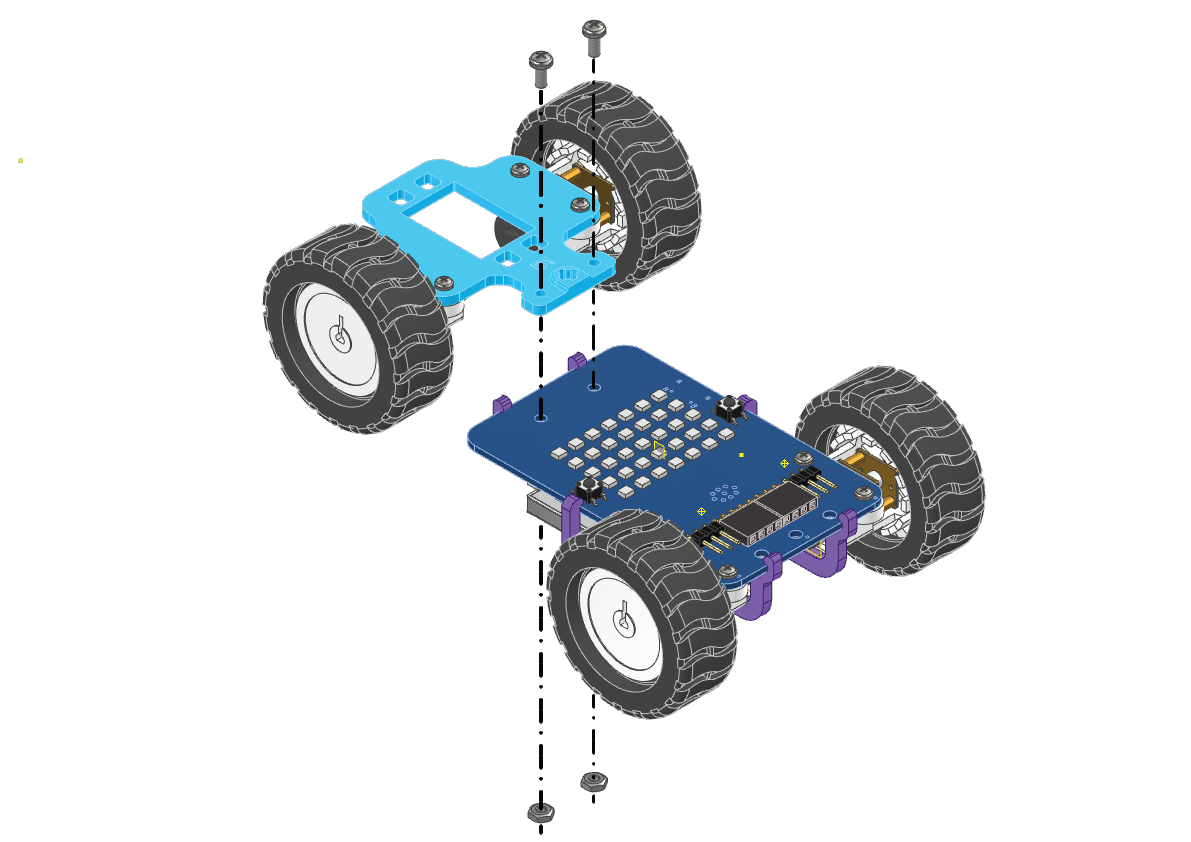
- इसके बाद अटैच करें रोबोट के सामने व्हील सब-असेंबली (पहियों के साथ) । M2.5 नट और बोल्ट का उपयोग करके इसे कस लें।

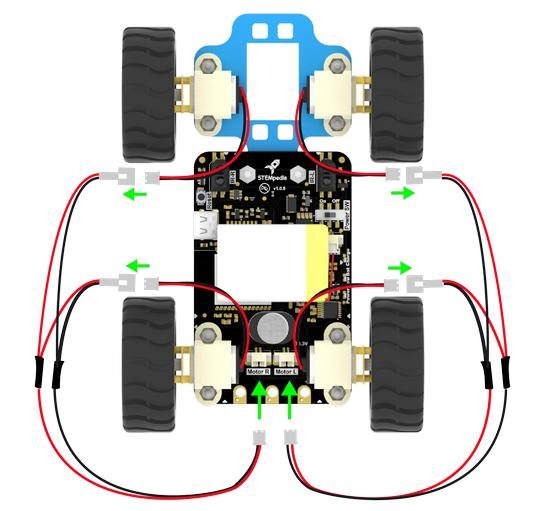
- मोटर कनेक्शन फोर-व्हील ड्राइव रोबोट के समान है। दो बायीं मोटरों को कनेक्ट करें और फिर तार को बोर्ड से कनेक्ट करें। सही मोटरों के लिए भी ऐसा ही करें।

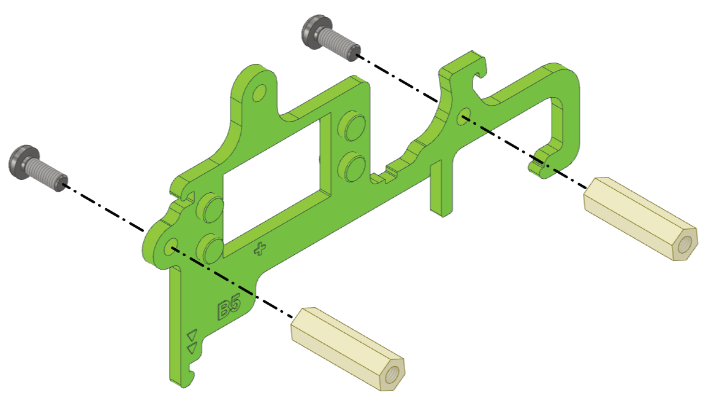
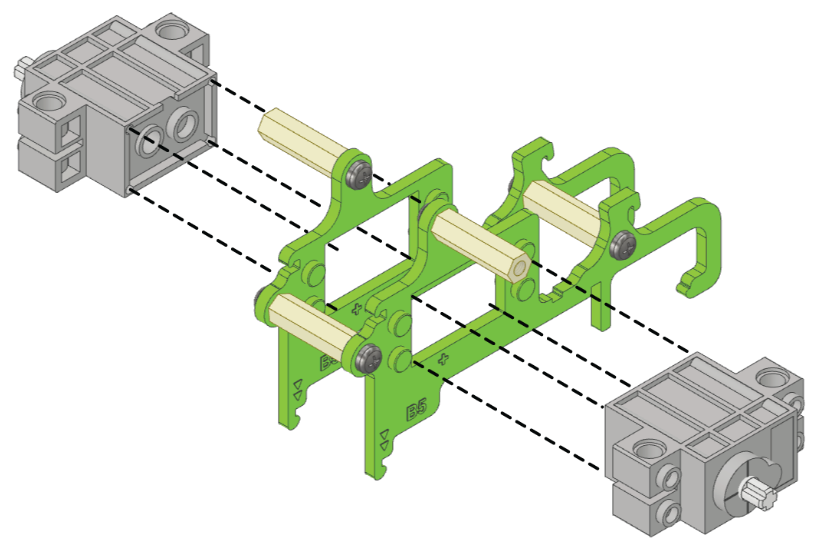
- नीचे दिखाए गए अनुसार 8 मिमी लंबाई के एम3 बोल्ट के साथ बी5 प्लेट पर दो स्पेसर्स को बांधें ।

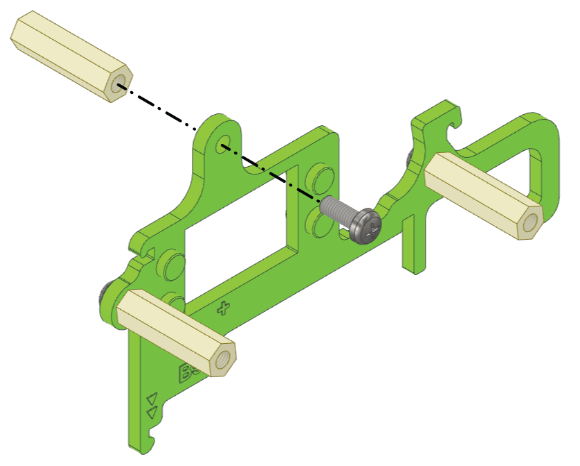
- जकड़ना नीचे दिखाए गए अनुसार 8mm लंबाई के M3 बोल्ट के साथ B5 प्लेट पर एक और Spacer । स्पेसर अन्य स्पेसर्स के विपरीत दिशा में होगा।

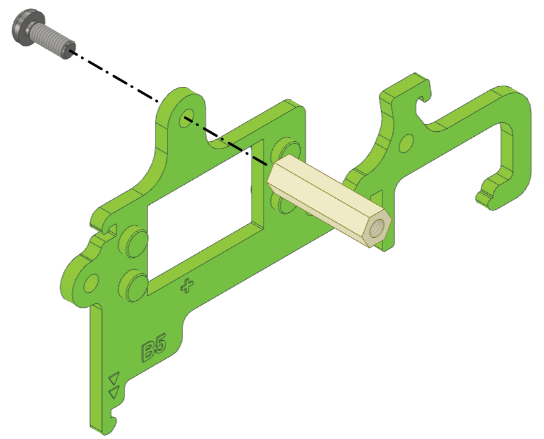
- 8mm लंबाई के M3 बोल्ट के साथ अन्य B5 प्लेट के शीर्ष पर एक और स्पेसर बांधें ।

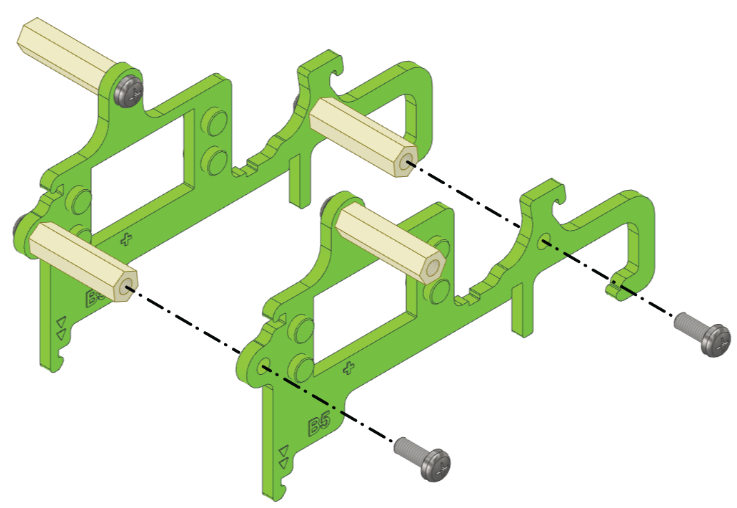
- नीचे दिखाए गए अनुसार दोनों B5 प्लेटों को स्पेसर्स पर संरेखित करें और जकड़ें उन्हें 8 मिमी लंबाई के दो एम 3 बोल्ट का उपयोग करना।

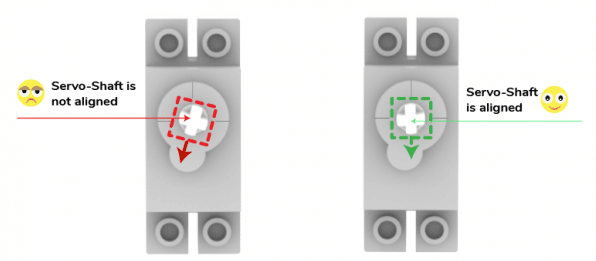
- डालना B5 प्लेट में सर्वो मोटर्स और स्नैप यह तंग। आपको यह सुनिश्चित करना होगा कि सर्वो मोटर का तार अंदर से आ रहा है। सर्वो मोटर शाफ़्ट B5 प्लेट पर ‘+’ चिह्न के साथ संरेखित होता है।

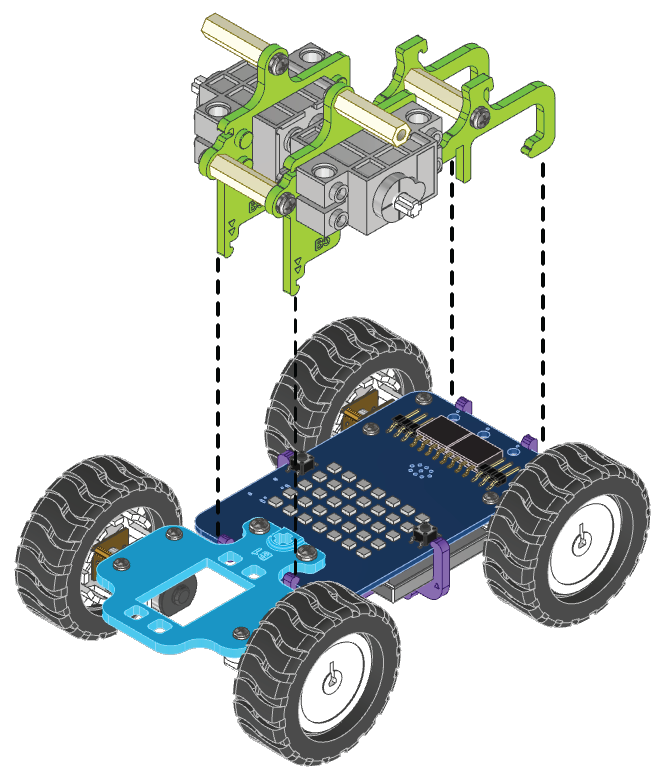
- Quarky रोबोट पर A5 प्लेट्स को स्नैप करें जैसा कि नीचे दिखाया गया है।

- B6 प्लेट को A5 प्लेट्स पर स्नैप करें।

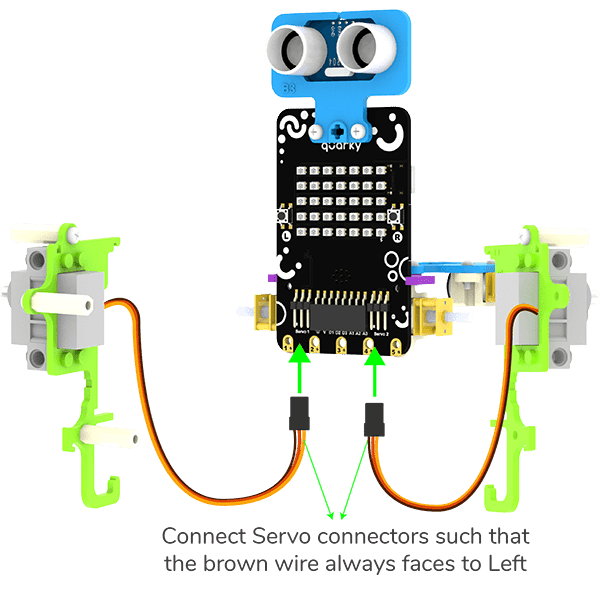
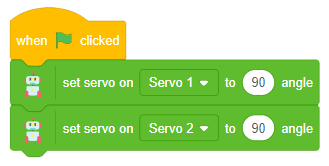
- लेफ्ट सर्वो मोटर को Servo 1 से और राइट सर्वो मोटर को Servo 2 से कनेक्ट करें।

- पिक्टोब्लॉक्स खोलें और Servo मोटर कोण को 90 डिग्री पर सेट करें। सर्वो हेड ठीक से संरेखित होना चाहिए।


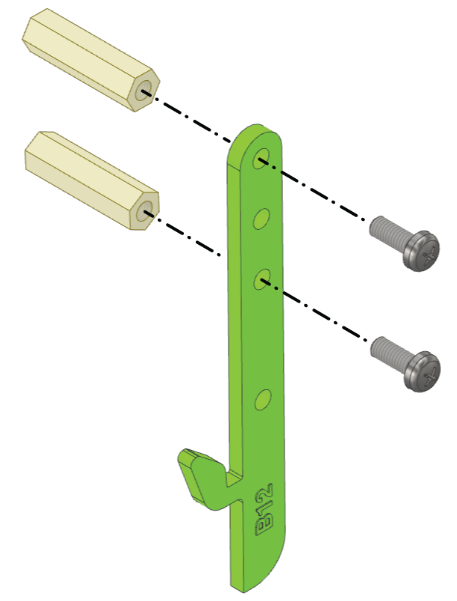
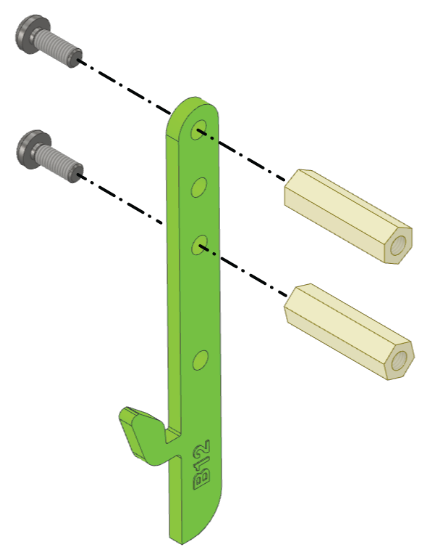
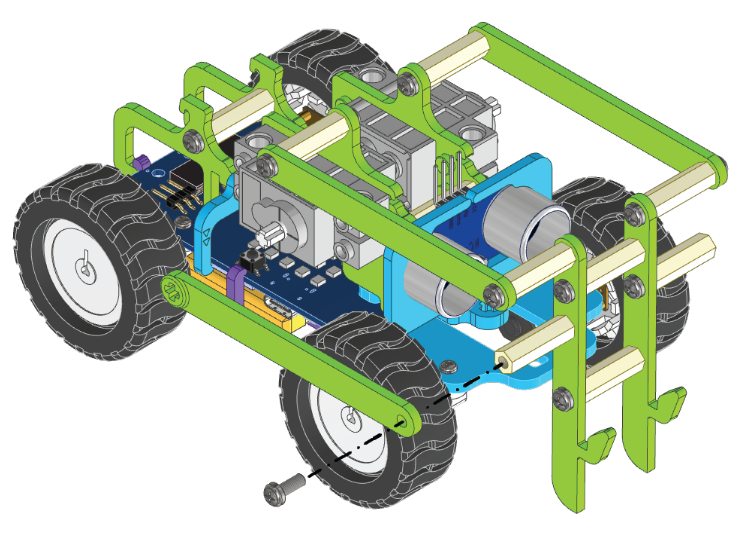
- अगली सब-असेंबली के लिए, 2 Spacers को 8mm लंबाई के M3 बोल्ट के साथ B12 लिंक से अटैच करें ।

- अब संलग्न करें 8mm लंबाई के M3 बोल्ट के साथ उसी B12 लिंक के लिए 2 और स्पेसर ।

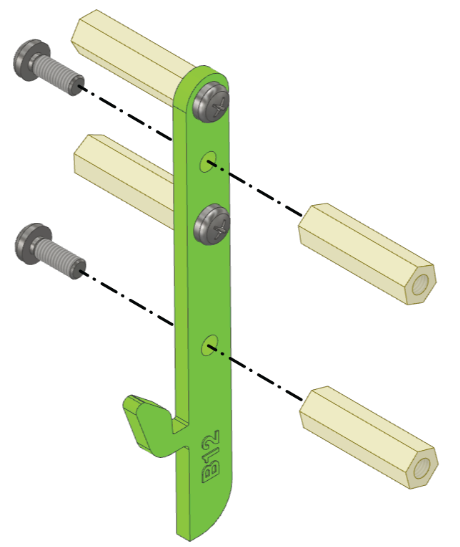
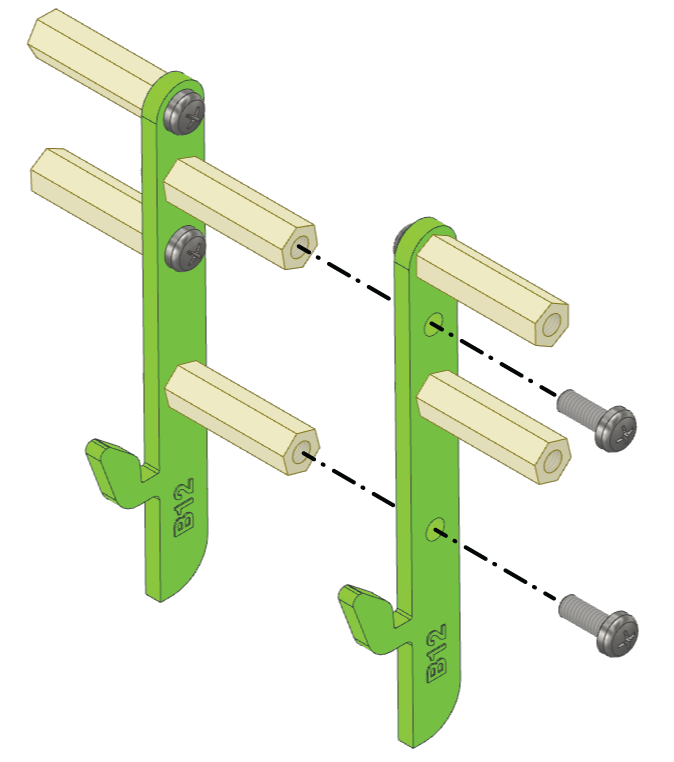
- अब विपरीत दिशा में 8mm लंबाई के M3 बोल्ट के साथ दूसरे B12 लिंक में 2 और Spacers संलग्न करें ।

- संरेखित दो B12 लिंक और फास्टन 8mm लंबाई के M3 बोल्ट के साथ। हम इस सब-असेंबली को Hook Assembly कहेंगे।

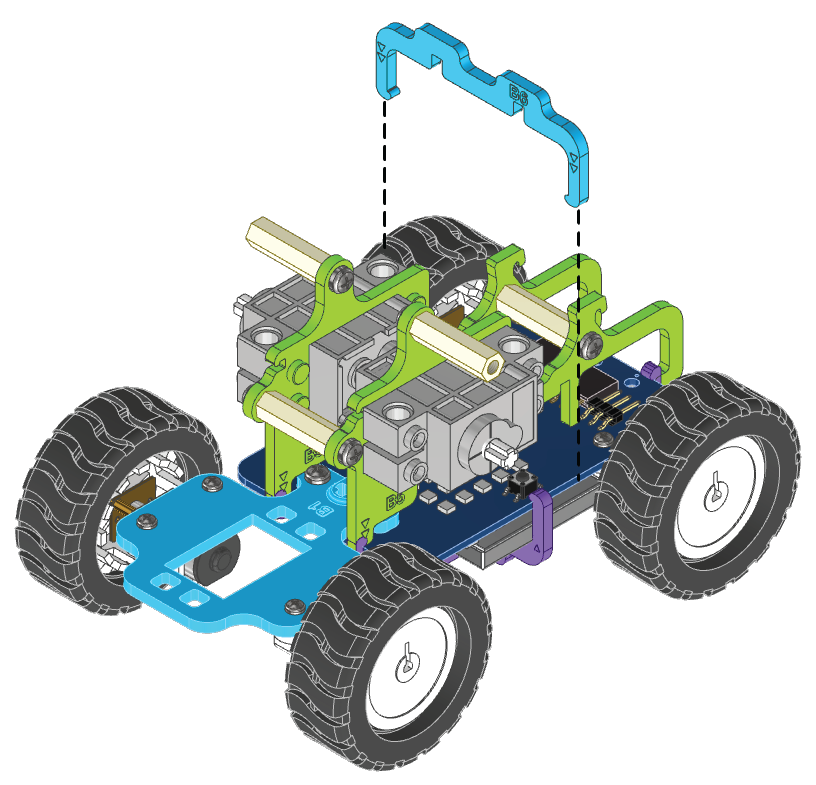
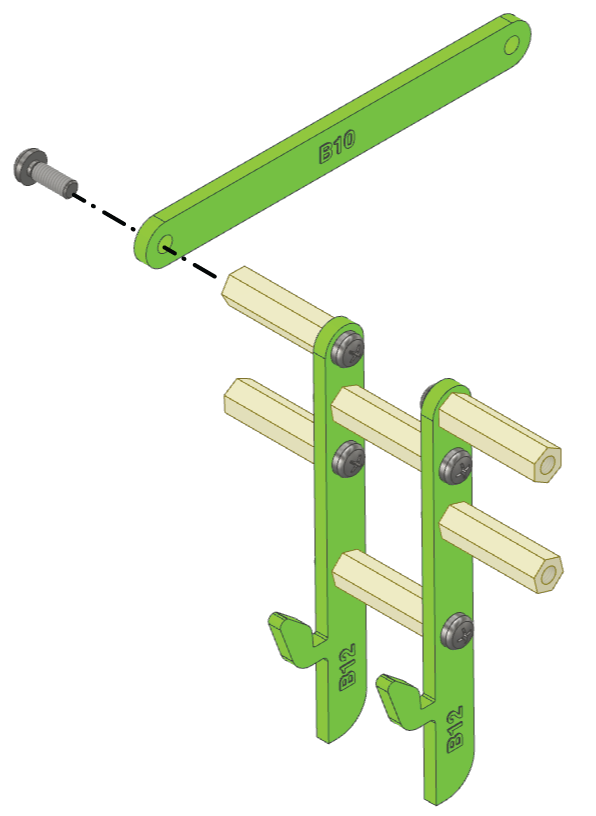
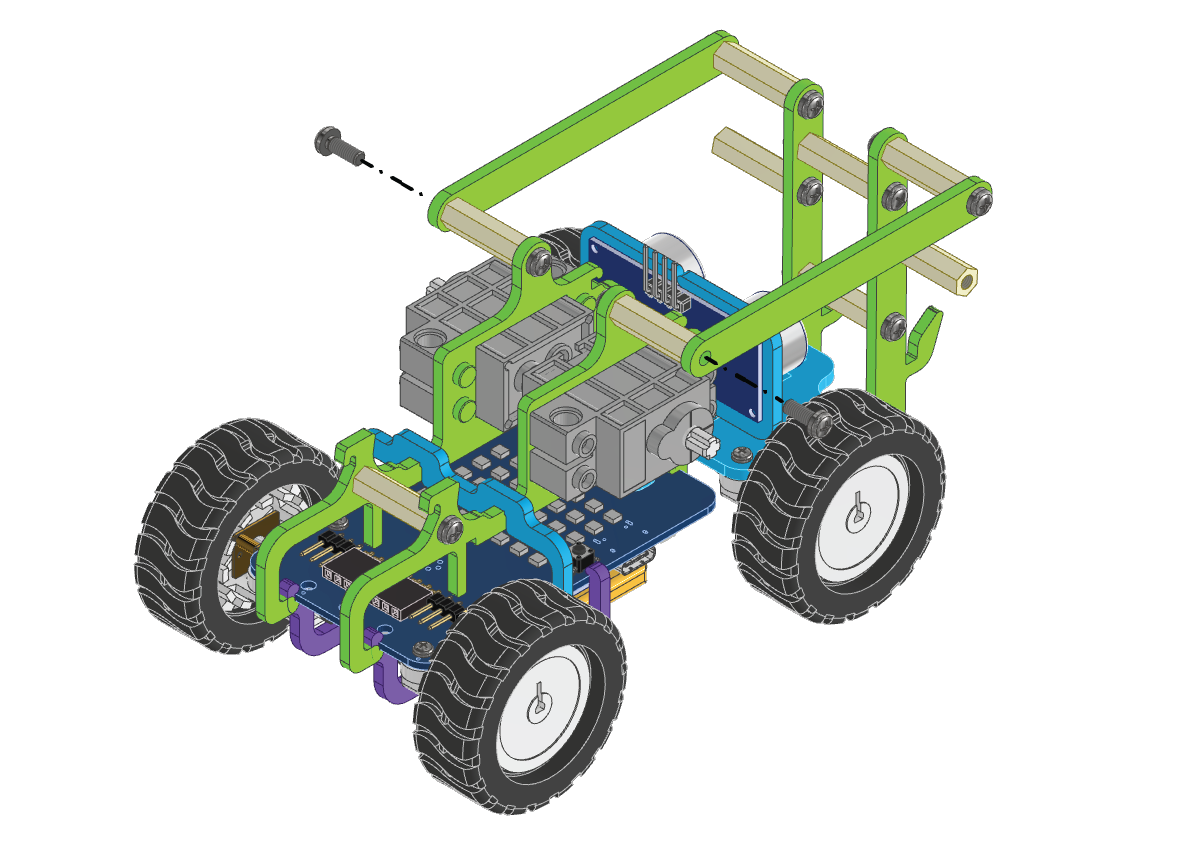
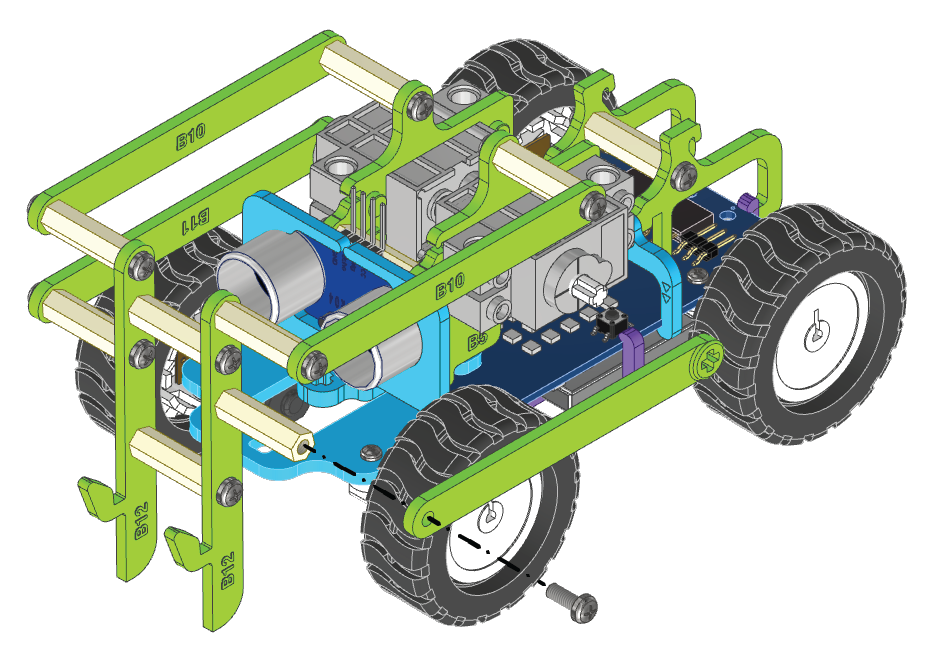
- 12mm लंबाई के M3 बोल्ट के साथ हुक असेंबली के स्पेसर्स के लिए B10 लिंक को संरेखित करें और संलग्न करें।

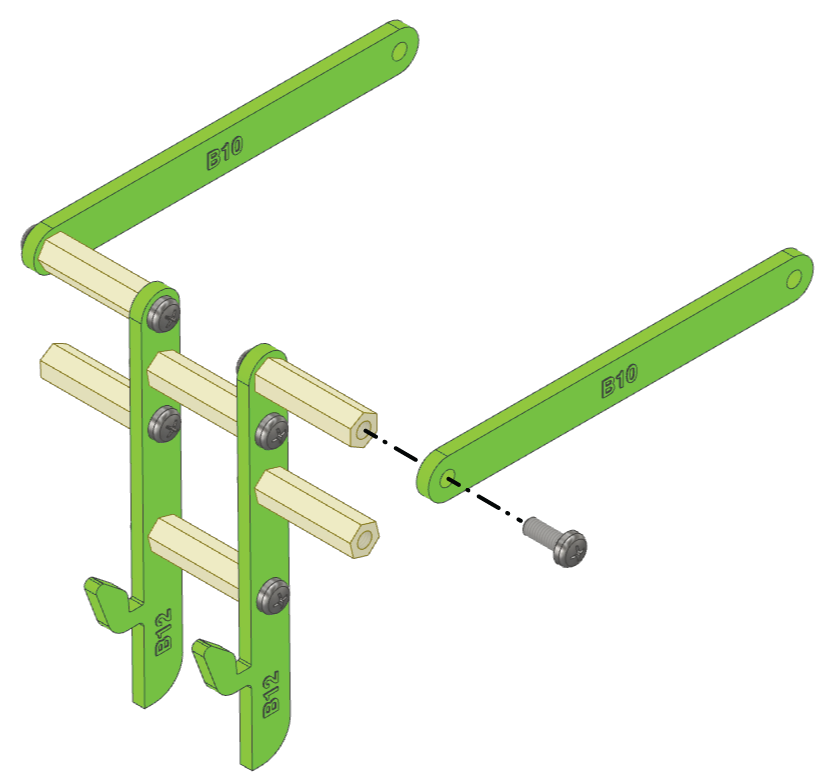
- 12mm लंबाई के M3 बोल्ट के साथ हुक असेंबली के स्पेसर्स के लिए अन्य B10 लिंक को संरेखित करें और संलग्न करें ।

- 12mm लंबाई के M3 बोल्ट के साथ B5 प्लेट के स्पेसर पर B10 प्लेट को माउंट करें।

- चटकाना सर्वो मोटर शाफ्ट पर B11 लिंक । दूसरी तरफ B11 लिंक अटैच करें यह 12mm लंबाई के M3 बोल्ट के साथ हुक असेंबली के लिए है।

- चटकाना सर्वो मोटर शाफ़्ट पर अन्य B11 लिंक । दूसरी तरफ B11 लिंक अटैच करें यह 12mm लंबाई के M3 बोल्ट के साथ हुक असेंबली के लिए है।

असेंबली पूरी हो गई है.

Activity: Pick and Place Action
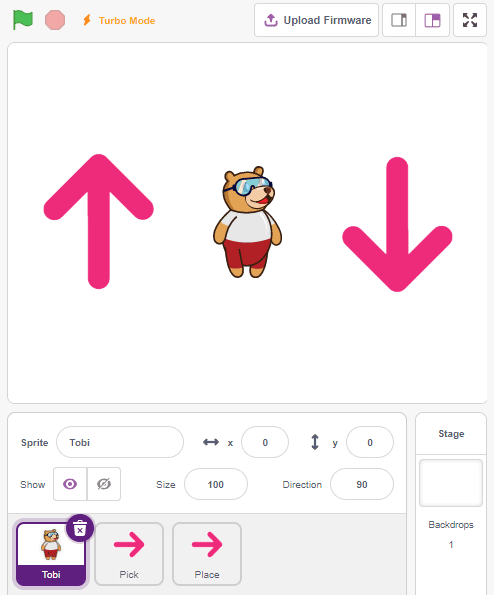
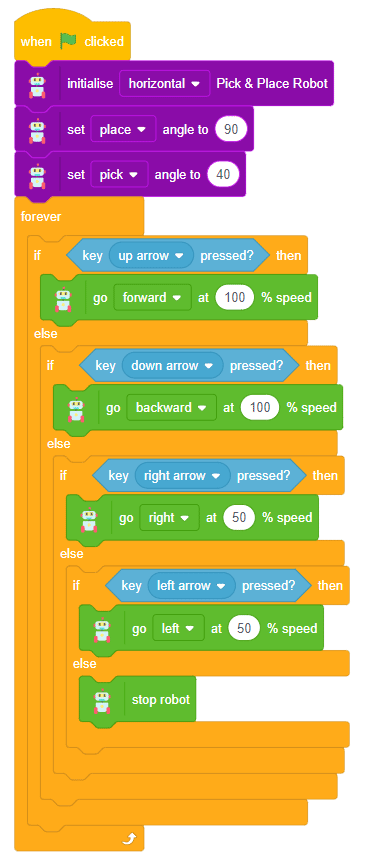
तीर कुंजियों (arrow keys) का उपयोग करके, रोबोट को चार दिशाओं में जाने में सक्षम होना चाहिए: आगे, पीछे, बाएँ और दाएँ। इसे ऊपर और नीचे तीर स्प्राइट्स की मदद से वस्तु को चुनने और रखने में भी सक्षम होना चाहिए। आइए देखें कि इसके लिए स्क्रिप्ट कैसे बनाई जाती है।
- PictoBlox ऐप में एक नई फाइल बनाएं।
- Quarky को PictoBlox से कनेक्ट करें।
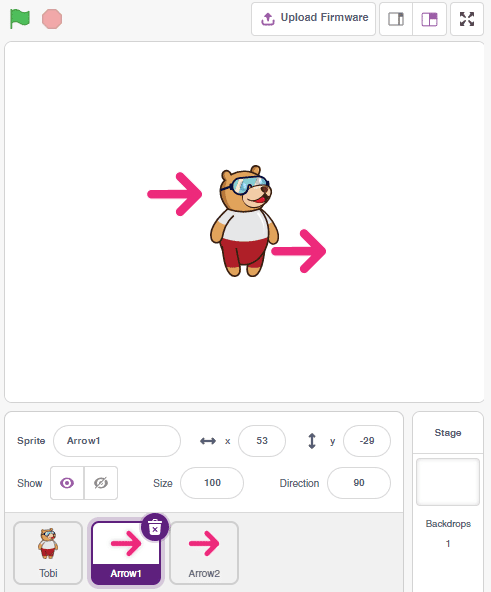
- स्प्राइट लाइब्रेरी से स्टेज पर दो Arrow स्प्राइट्स जोड़ें।
- ऐरो स्प्राइट्स का नाम बदलकर Arrow और Place ।

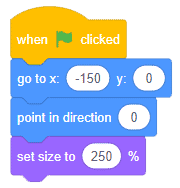
- Pick स्प्राइट पर क्लिक करें और go to -150, 0 positions के लिए स्क्रिप्ट जोड़ें, 0 डिग्री में इंगित करें, और आकार को 250% पर सेट करें।

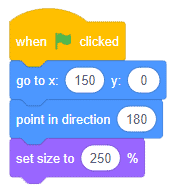
- Place स्प्राइट पर क्लिक करें और go to 150, 0 positions के लिए स्क्रिप्ट जोड़ें, 180 डिग्री पर इंगित करें और आकार को 250% पर सेट करें।

- अंत में, मंच स्थापित करने के लिए green flag पर क्लिक करें।

- Quarky Ultimate एक्सटेंशन जोड़ें।

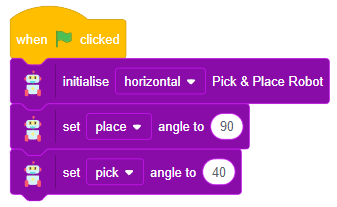
- Tobi Add को चुनें when green flag clicked ब्लॉक जोड़े।
- ऐड initialize ( ) Pick and Place Robot Quarky Ultimate Robot palette से रोबोट ब्लॉक चुनें और रखें। अभिविन्यास को क्षैतिज (horizontal) के रूप में चुनें।
- set ( ) angle to ( ) ब्लॉक में जोड़ें। 90 के स्थान और कोण के रूप में क्रिया का चयन करें।
- set ( ) angle to ( ) ब्लॉक जोड़ें। पिक के रूप में क्रिया का चयन करें और 40 पर कोण बनाएं।

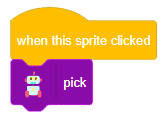
- Pick Action: Pick स्प्राइट पर क्लिक करें और Control पैलेट से when the sprite is clicked जोड़ें। Pick ऐरो पर क्लिक करने पर यह स्क्रिप्ट शुरू कर देगा। Quarky Ultimate Robot पैलेट से pick ब्लॉक जोड़ें।

- Place Action: Place स्प्राइट पर क्लिक करें और when the sprite is clicked Control पैलेट से ब्लॉक जोड़ें। Place एरो पर क्लिक करने पर यह स्क्रिप्ट शुरू कर देगा। Quarky Ultimate Robot पैलेट से place ब्लॉक जोड़ें।

- कोड का परीक्षण करें।

Manually Controlled Robot – Code
Activity: Output
अगले पाठ पर जाने से पहले सुनिश्चित करें कि आपने assignment पूरा कर लिया है और सबमिट कर दिया है, साथ ही quiz में भाग लें।