Actuators

सरल शब्दों में, एक एक्चुएटर एक उपकरण है जो किसी अन्य डिवाइस को निर्वहन करता है । दूसरे शब्दों में, यह एक मशीन में एक घटक है जो ऊर्जा को अवशोषित (absorb) करता है – जो हवा, बिजली या तरल से आ सकते है – और इसका उपयोग किसी चीज़ की गति को सक्षम करने के लिए किया जाता है। एक एक्चुएटर का काम मानव शरीर के काम करने के तरीके के अनुरूप है। वे शरीर में मांसपेशियों के समान आंदोलन करने के लिए एक मशीन में काम करते हैं जो भोजन से प्राप्त ऊर्जा को गति में परिवर्तित करते हैं, जैसे हाथ की गति।
Types of Actuators
जहाँ तक इलेक्ट्रॉनिक्स का संबंध है, चार मुख्य प्रकार के एक्चुएटर्स होते हैं:
Electrical: ये एक्ट्यूएटर्स बिजली को घूम (rotational) गति, रैखिक (linear) गति या दोनों में परिवर्तित करते हैं। ये मुख्य रूप से ये इलेक्ट्रिक कार, रोबोट आदि में पाए जाते हैं।
Mechanical: ये circular गति को linear (सीधी-रेखा) गति में परिवर्तित करते हैं। ये सबसे व्यापक रूप से उपयोग किए जाने वाले एक्ट्यूएटर्स में से हैं, जैसे कि पुली और गियर।
Hydraulic: ये मोटर गति उत्पन्न करने के लिए पानी या तेल जैसे तरल पदार्थों का उपयोग करते हैं। ये क्रेन, बुलडोजर आदि में पाए जा सकते हैं।
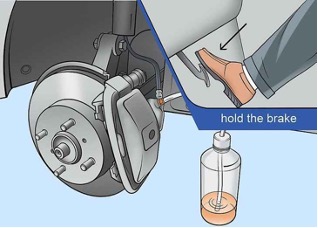
Pneumatic: ये प्रवर्तक संपीड़ित compressed air या high pressure से प्राप्त ऊर्जा का उपयोग करते हैं और इसे motion में परिवर्तित करते हैं। उनका उपयोग तब किया जाता है जब मशीन को जल्दी से शुरू या बंद करना चाहिए- उदाहरण के लिए, बस ब्रेक, फिटनेस उपकरण इत्यादि।

Servo Motor
सर्वो मोटर, एक उपकरण है जिसका उपयोग किसी मशीन के पुर्जों को घुमाने या धकेलने के लिए किया जाता है जिससे यह सटीकता के साथ जुड़ा होता है। DC मोटर्स के विपरीत, वे आम तौर पर एक विशेष कोण (particular angle) पर घूमते हैं और फिर रुक जाते हैं।

Activity 1: Assembling Obstacle-Avoiding Robot
जैसा कि नाम से पता चलता है, बाधा से बचने वाला रोबोट एक स्मार्ट गैजेट है। जो अलग-अलग दिशाओं में खुद को घुमाकर अपने रास्ते में आने वाली बाधाओं का पता लगा सकता है और उनसे बच सकता है। इस सभा का उपयोग हमारी आने वाली एक्टिविटी में होने जा रहा है।
Assembly Steps
नीचे दिए गए स्टेप्स का पालन करें:
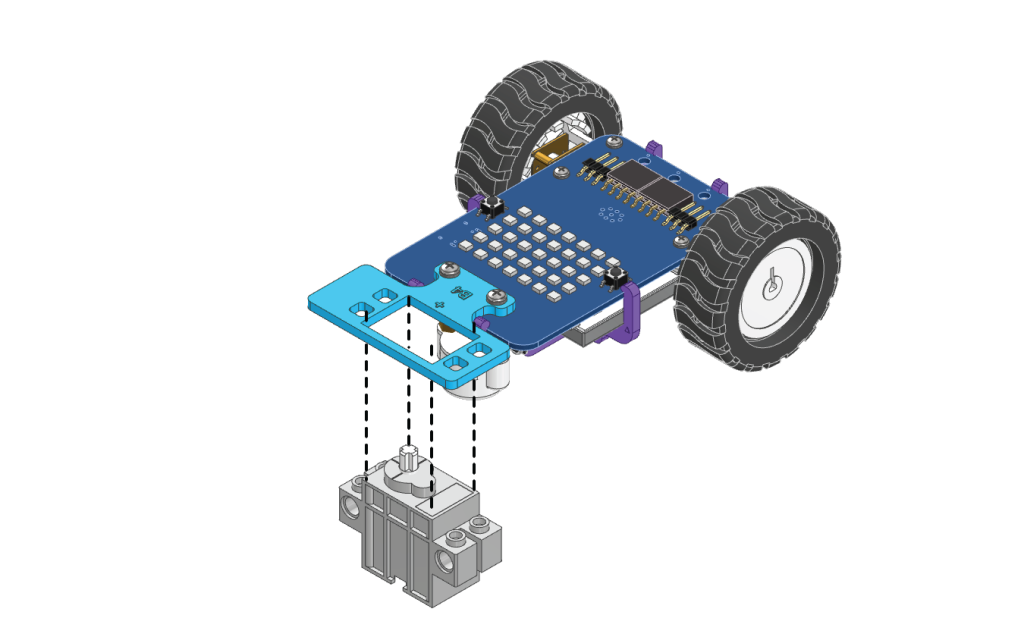
- स्क्रू ड्राइवर (Screw Driver) का उपयोग करके कैस्टर व्हील को रोबोट से अलग करे।

- अब, उसी बोल्ट का उपयोग करके B4 प्लेट और कैस्टर व्हील को जोड़े ।

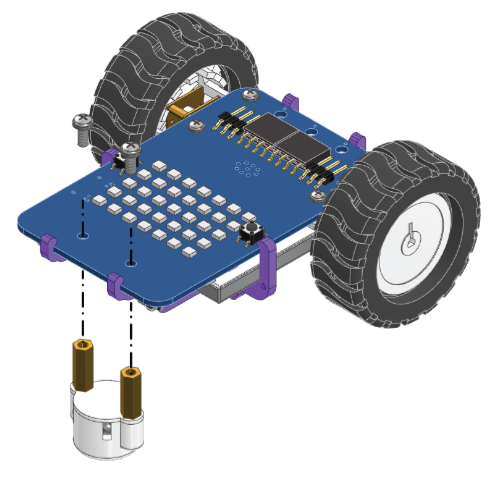
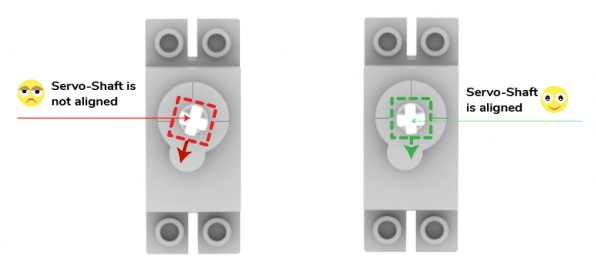
- सर्वो मोटर को B4 प्लेट पर स्नैप करें । ध्यान दें : सर्वो मोटर का सफेद शाफ्ट ऊपर की ओर इशारा कर रहा है और B4 प्लेट पर चिह्नित क्रॉस के साथ संरेखित है।

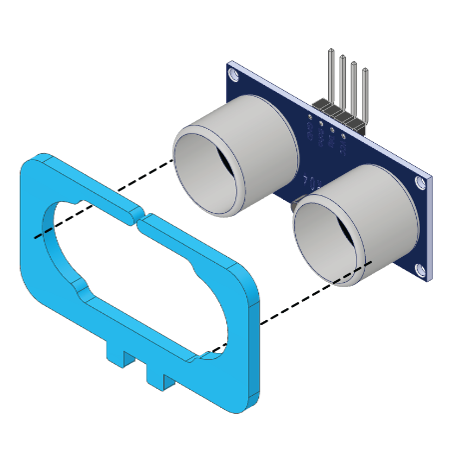
- फिर, अल्ट्रासोनिक सेंसर (Ultrasonic Sensor) को B2 प्लेट में स्नैप करें ।

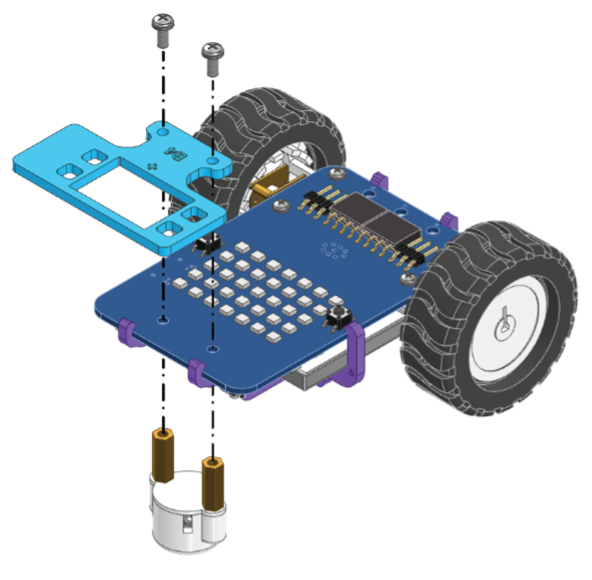
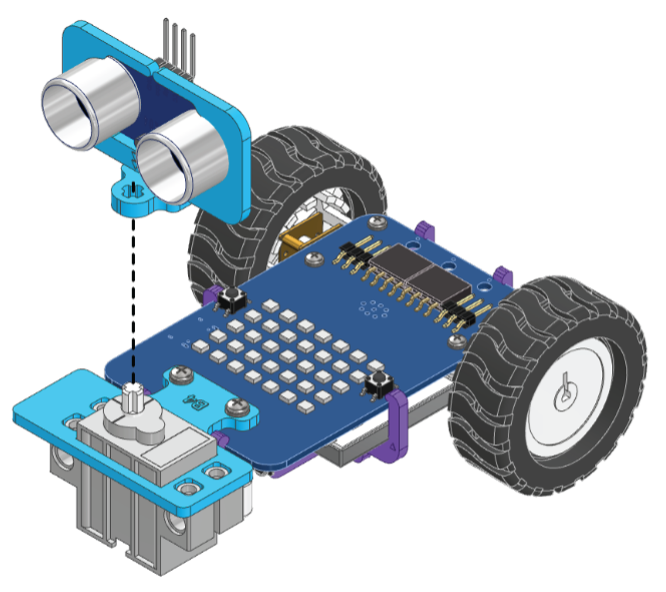
- दिखाए गए अनुसार B2 प्लेट को B4 प्लेट में पुश-फिट करें । सुनिश्चित करें कि भागों को एक दूसरे के साथ ठीक से गठबंधन किया गया है।

- अब, सब-असेंबली को सर्वो मोटर के शाफ़्ट पर रखें ।

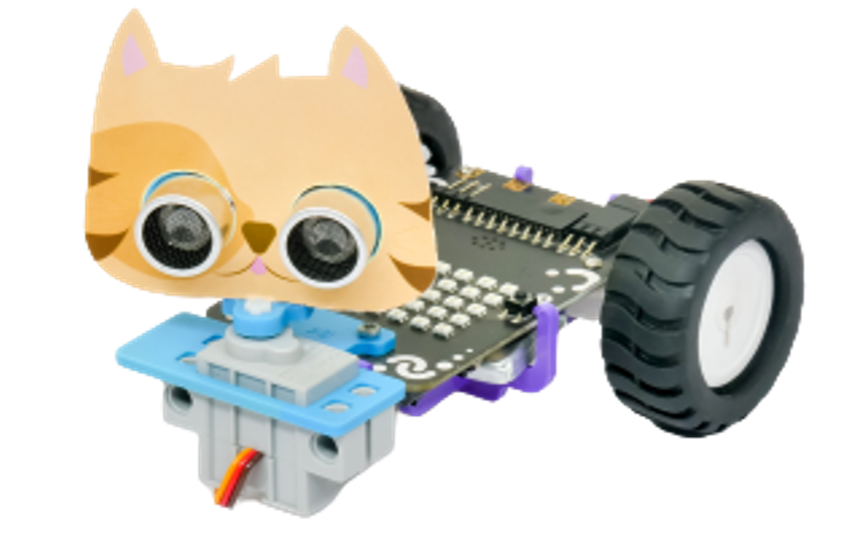
- वैकल्पिक रूप से, आप इसे आकर्षक बनाने के लिए टाइगर के पेपर कटआउट को उपरोक्त रोबोट पर रख सकते हैं!


Activity 2: Calibration of Servo Motor
सर्वो मोटर अंशांकन (calibration) का उद्देश्य आपके सर्वो मोटर के कोण (angle) को ठीक से संरेखित करना है।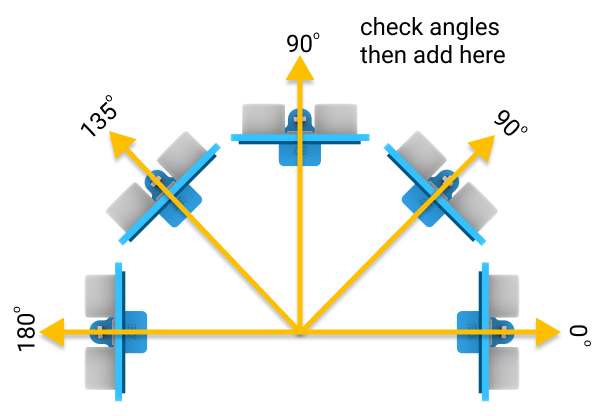
सर्वो मोटर के configuration के अनुसार, 90° का अर्थ forward की ओर है। इसलिए, 45° right ओर है, और 135° left ओर है, जो कि आगे की स्थिति से left ओर 45° के अलावा और कुछ नहीं है।
सर्वो मोटर को Quarky Servo Connector 1 से जोड़ा जाएगा। Quarky पर दो सर्वो पोर्ट हैं।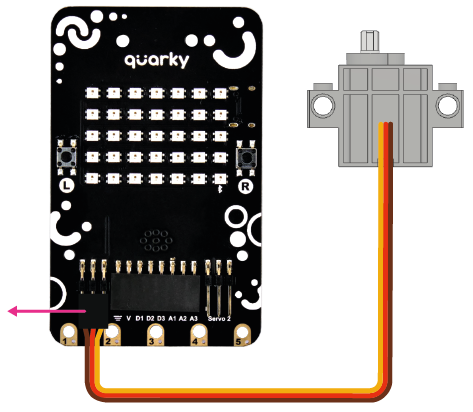
Servo Control Blocks
PictoBlox में एक ब्लॉक है जिसका उपयोग सर्वो मोटर को कैलिब्रेट करने के लिए किया जा सकता है:
Set servo on ( ) to ( ) angle : इस ब्लॉक का उपयोग सर्वो मोटर के कोण को 0 से 180 के बीच किसी विशेष कोण में बदलने के लिए किया जाता है।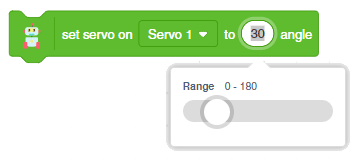
हमने Obstacle Avoidance Robot को assemble किया है। हम समझेंगे कि इस ब्लॉक का उपयोग करके इसे कैसे कैलिब्रेट करना है। नीचे दिए गए चरणों का पालन करें:
PictoBlox ऐपमें एक नई फाइल बनाएं।QuarkyकोPictoBloxसे कनेक्ट करें।- सर्वो हेड से अल्ट्रासोनिक सेंसर असेंबली को अलग करें।
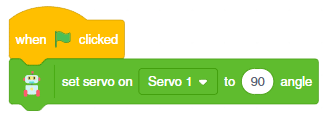
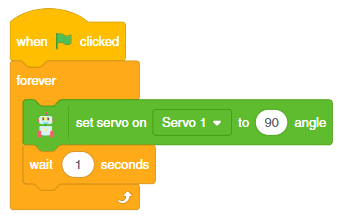
- Event पैलेट पर जाएं और स्क्रिप्टिंग क्षेत्र में when green flag clicked ब्लॉक रखे।
- इसके बाद, set servo on ( ) to ( ) angle को Robot पैलेट से when green flag clicked ब्लॉक के नीचे रखें।

- स्क्रिप्ट चलाएँ। सर्वो हेड ठीक से संरेखित होना चाहिए।

- अंत में, अल्ट्रासोनिक सेंसर असेंबली को सर्वो हेड में डालें।
आपका अंशांकन (calibration) सही से हो गया है।
Activity 3: Servo Movement
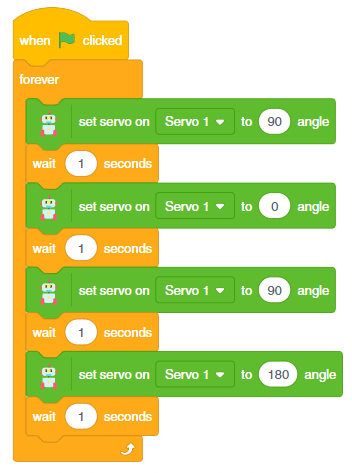
अगली गतिविधि को जारी रखते हुए, यहाँ हम सर्वो मोटर के शाफ़्ट को विभिन्न कोणों पर घुमाएँगे, जैसे 0, 90 और 180 डिग्री।
चरणों का पालन करें:
Eventपैलेट पर जाएं और स्क्रिप्टिंग क्षेत्र में when green flag clicked ब्लॉक जोड़ें।- इसके नीचे forever ब्लॉक रखें।
- forever ब्लॉक के भीतर
Robotपैलेट से set servo on ( ) to ( ) angle ब्लॉक जोड़ें, और कोण को 90 में बदलें। - wait ( ) seconds ब्लॉक को forever ब्लॉक के अंदर रखकर 1 सेकंड की देरी डाले।

- पिछले दो ब्लॉकों को डुप्लिकेट करें और अब set servo on ( ) to ( ) angle में कोण को 0 पर सेट करें
- इस चरण को दोहराएं और अगले सर्वो ब्लॉकों के लिए कोण को 90 और 180 में बदलें।

- इसे चलाने के लिए green flag पर क्लिक करें। निर्देशों के अनुसार सर्वो अपना कोण बदलेगा।
- फ़ाइल को
Servo Movementके रूप में सेव करे।
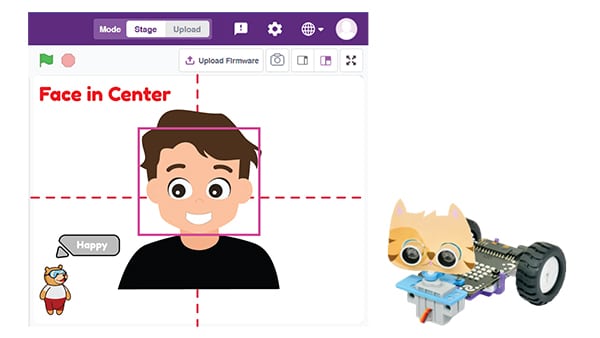
Activity 4: Face Tracking with Robot
इस गतिविधि में, हम रोबोट को चेहरे का पता लगाने और उसे ट्रैक करने देंगे।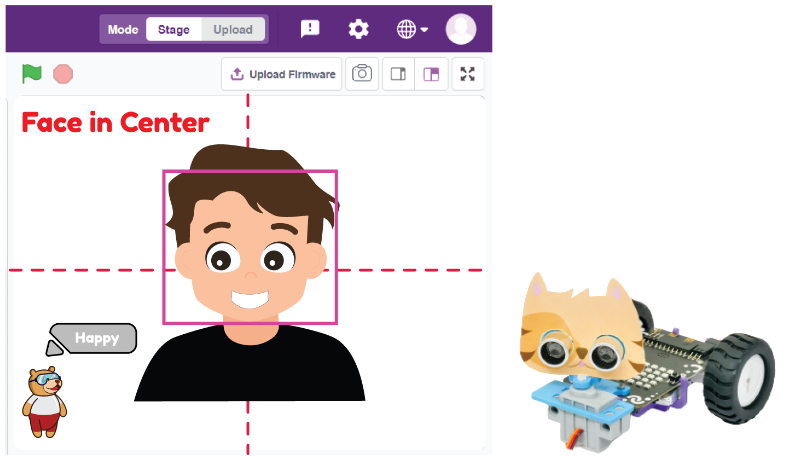
Coding Steps
नीचे दिए गए स्टेप्स का पालन करें:
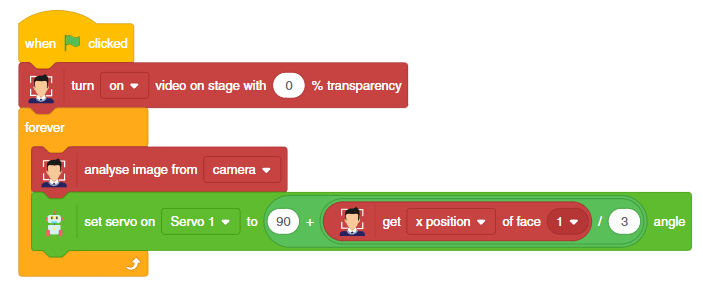
PictoBlox ऐपमें एक नई फाइल बनाएं।QuarkyकोPictoBloxसे कनेक्ट करें।Eventsपैलेट से when green flag clicked ब्लॉक को खींचें और छोड़ें।- फिर, turn ( ) video on stage with ( ) % transparency को जोड़ें
Face Detectionएक्सटेंशन और ड्रॉप-डाउन से ON का चयन करें। इससे कैमरा चालू हो जाएगा। Controlपैलेट से turn ( ) video on stage with ( ) % transparency ब्लॉक को forever ब्लॉक के नीचे रखे- forever ब्लॉक के अंदर, analyse image from ( ) ब्लॉक जोड़ें। यह ब्लॉक कैमरा द्वारा पहचाने गए चेहरे का विश्लेषण करेगा। ड्रॉपडाउन से camera चुनें।
- अपने सर्वो की स्थिति बदलने के लिए, set servo on ( ) to ( ) angle ब्लॉक को analyse image from ( ) ब्लॉक के नीचे जोड़े।
- स्क्रिप्टिंग क्षेत्र में
Operatorपैलेट से डिवीजन ( ) / ( ) ब्लॉक जोड़ें। - get ( ) of face ( ) के पहले स्थान पर addition ( ) + ( ) , और 3 को दूसरे स्थान पर रखें। dropdown से X position चुनें।
- इसके बाद, addition ( ) + ( ) ब्लॉक को set servo ( ) to ( ) angle ब्लॉक के अंदर रखें। 90 को पहली जगह में रखें और ( ) / ( ) ब्लॉक को दूसरी जगह में रखें।
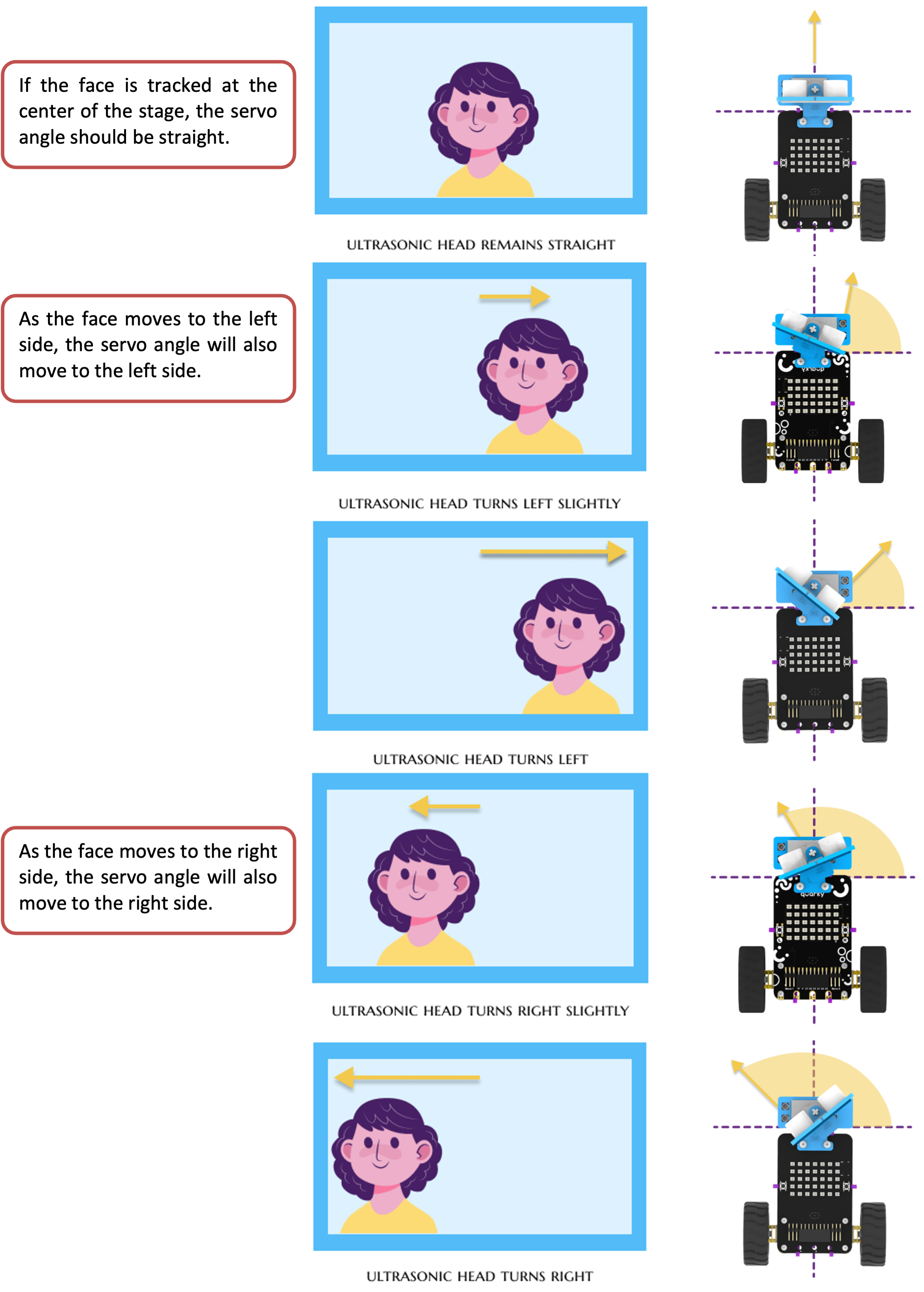
 हमारा अगला कदम यह जांचना है कि यह ठीक से काम कर रहा है या नहीं। जब भी आपका चेहरा कैमरे के सामने आएगा, उसे उसका पता लगना चाहिए और जैसे-जैसे आप दाएं या बाएं चलते हैं, आपके रोबोट का सिर भी उसी के अनुसार हिलना चाहिए।
हमारा अगला कदम यह जांचना है कि यह ठीक से काम कर रहा है या नहीं। जब भी आपका चेहरा कैमरे के सामने आएगा, उसे उसका पता लगना चाहिए और जैसे-जैसे आप दाएं या बाएं चलते हैं, आपके रोबोट का सिर भी उसी के अनुसार हिलना चाहिए।
Activity: Output
![]()
अगले पाठ पर जाने से पहले सुनिश्चित करें कि आपने assignment पूरा कर लिया है और सबमिट कर दिया है, साथ ही quiz में भाग लें।