
Activity 1: Assembling the Vertical Robot
हम देखेंगे कि हॉरिजॉन्टल रोबोट को वर्टिकल रोबोट में कैसे बदला जाए।
Assembly Steps
नीचे दिए गए स्टेप्स का पालन करें:
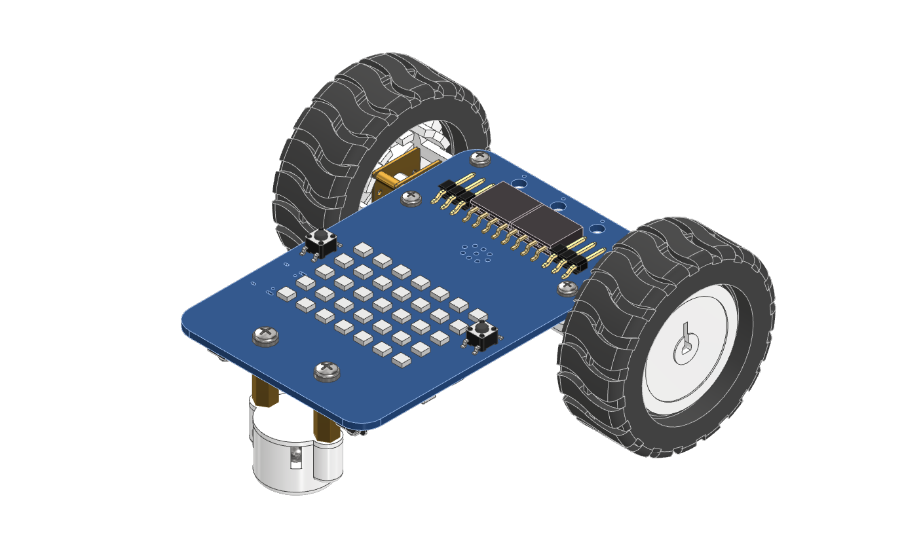
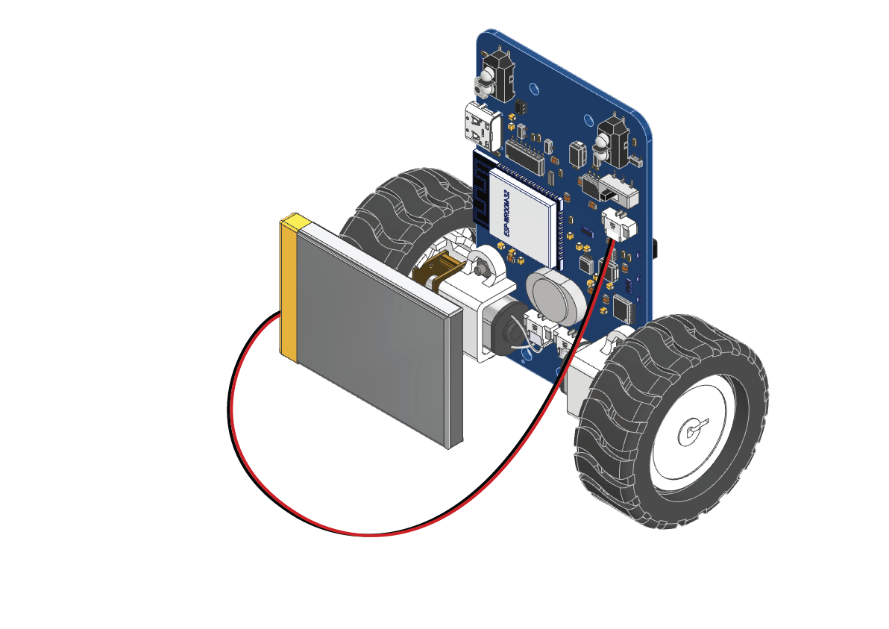
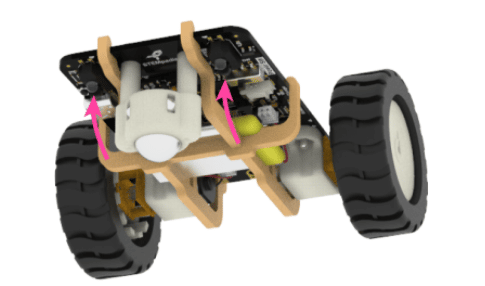
- अब तक, आपका रोबोट ऐसा दिखता है।

- बैटरी होल्डर लॉक और फिर बैटरी होल्डर को हटा दें। धीरे से किनारों से अनस्नैप (unsnap) करें।
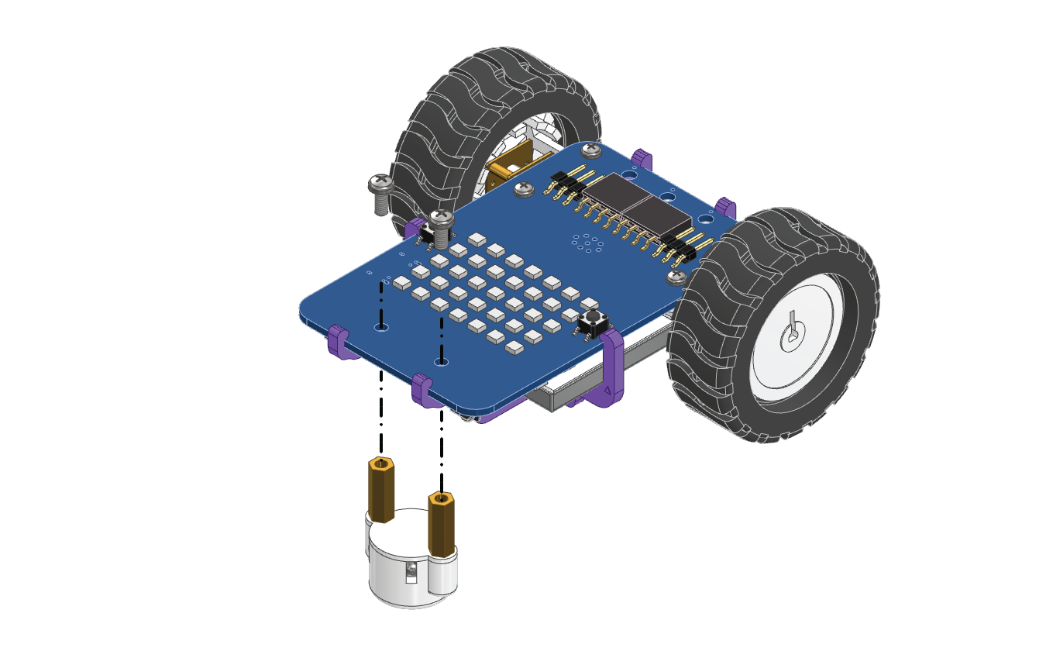
- कैस्टर व्हील को रोबोट से हटा दें।

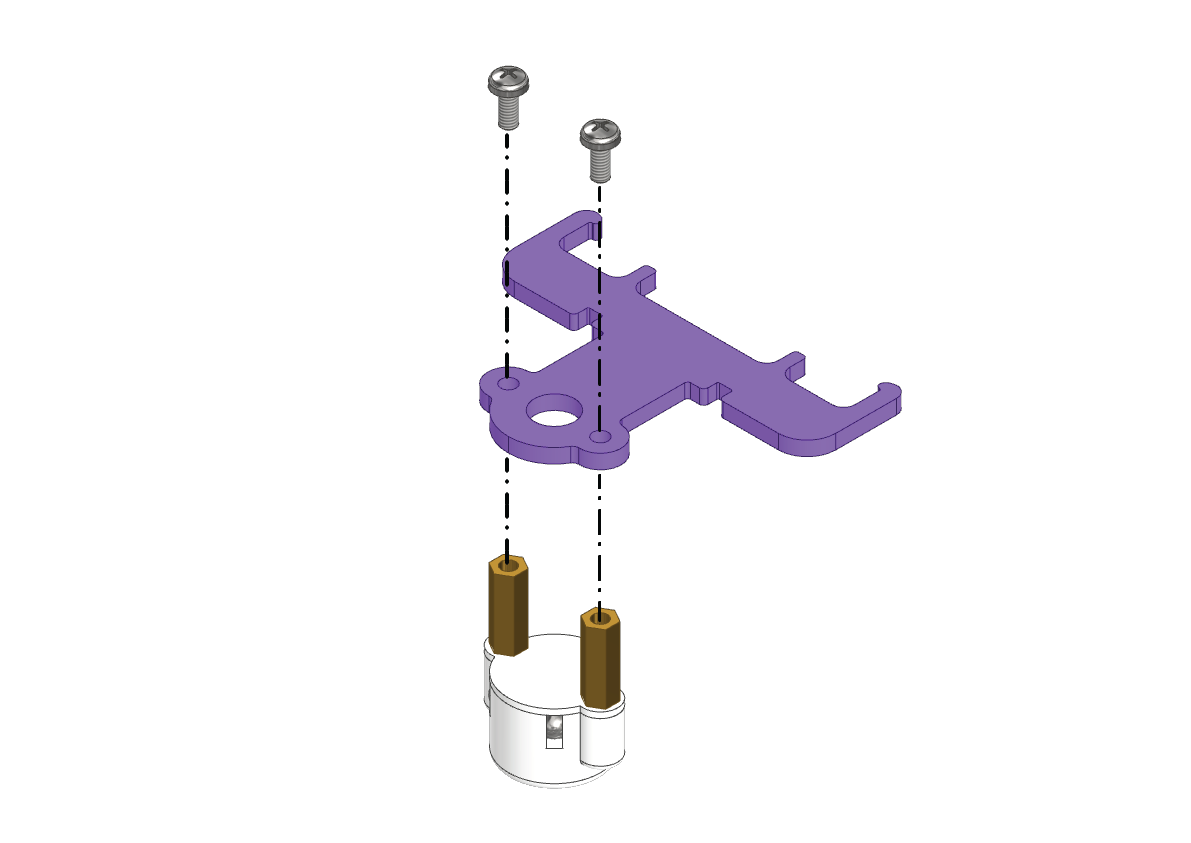
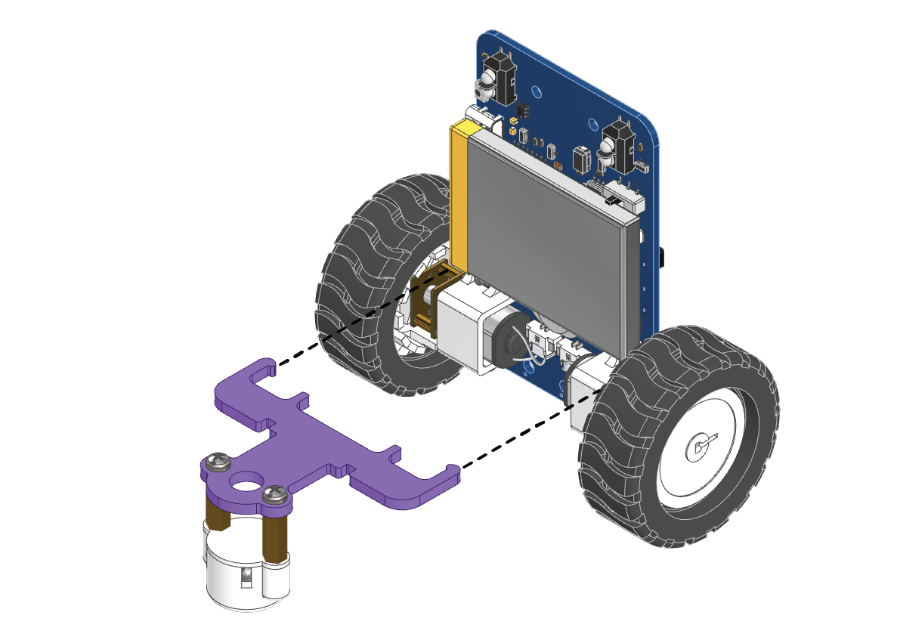
- कैस्टर व्हील को कैस्टर प्लेट से अटैच करें।

- बैटरी को रोबोट से अटैच करें।

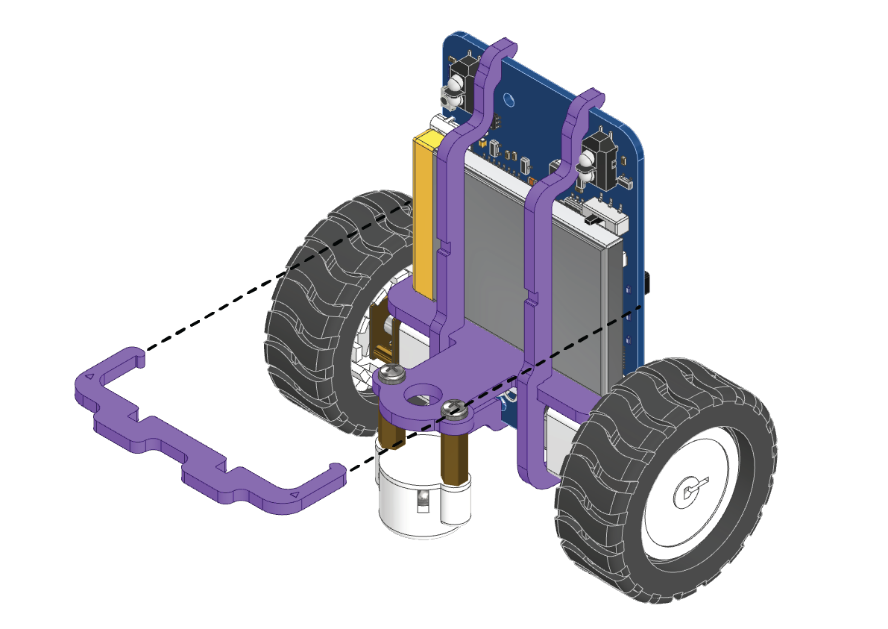
- दिखाए गए अनुसार कैस्टर प्लेट को रोबोट के पीछे स्नैप करें।

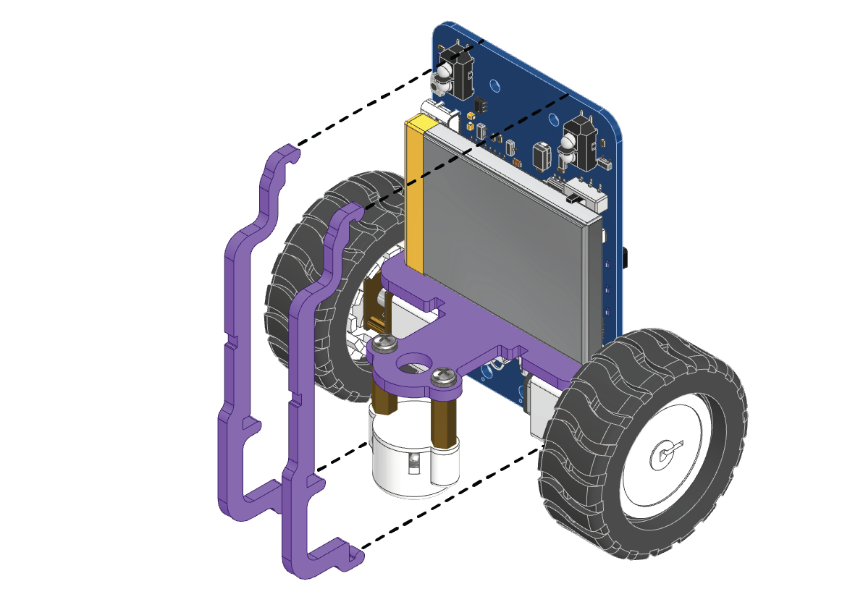
- बैटरी को सुरक्षित करने के लिए बैटरी होल्डर और बैटरी होल्डर लॉक को माउंट करें।


आपका रोबोट तैयार है।
Activity 2: Making a Hand Detection System
इस गतिविधि में, हम Quarky को हाथों का पता लगाने देंगे।
आइए IR सेंसर को समझते हैं। एक इन्फ्रारेड (IR) सेंसर एक इलेक्ट्रॉनिक उपकरण है जो अपने आसपास के वातावरण में इन्फ्रारेड विकिरण (infrared radiation) को मापता है और उसका पता लगाता है। IR मानव आंखों के लिए अदृश्य है।
Quarky में 2 IR सेंसर हैं।
आइए समझते हैं कि वे कैसे काम करते हैं।
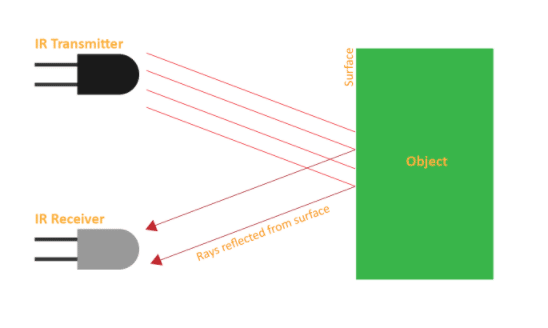
एक IR सेंसर में 2 एलईडी होते हैं: एक जो IR प्रकाश को प्रसारित (transmit) करता है और एक जो IR प्रकाश प्राप्त (receive) करता है। जब IR किरणें संचारित होती हैं, तो वे निकटतम सतह से उछलती हैं और रिसीवर LED पर वापस आ जाती हैं। इस प्रकार IR सेंसर किसी वस्तु का पता लगाता है।
हम उस मूल्य के आधार पर PictoBlox में सेंसर मान प्राप्त कर सकते हैं। हम अनुमान लगा सकते हैं कि कोई बाधा है या नहीं।
- अगर सेंसर को कुछ नहीं पता चलता है, तो इसका आउटपुट वैल्यू बढ़ जाता है। इसका मतलब है कि सेंसर सक्रिय है।
- यदि यह एक बाधा का पता लगाता है, तो इसका आउटपुट वैल्यू घट जाता है। इसका मतलब है कि सेंसर निष्क्रिय है।
हमें पहले IR सेंसर को कैलिब्रेट करने की जरूरत है, यानी सुनिश्चित करें कि वे ठीक काम कर रहे हैं। उसके लिए, हम उन्हें कैलिब्रेट करने के लिए PictoBlox में एक स्क्रिप्ट बनाएंगे।
Coding Steps
नीचे दिए गए स्टेप्स का पालन करें:
- PictoBlox ऐप खोलें, My Space पर जाएं, और एक नई फ़ाइल बनाने के लिए + बटन पर क्लिक करें।
- Quarky को PictoBlox से कनेक्ट करें।
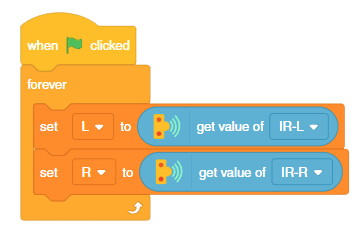
- Variables पैलेट पर जाएं और L और R नाम के दो Variables बनाएं।

- अगला, बाएँ और दाएँ IR सेंसर वैल्यू के लिए चर वैल्यू को अद्यतन करने के लिए निम्न स्क्रिप्ट बनाएँ।
- आप देखेंगे कि यह मंच के ऊपरी-बाएँ कोने में दिखाई देता है। हम अपने IR सेंसर के लिए थ्रेशोल्ड वैल्यू निर्धारित करने के लिए variables का उपयोग करेंगे।
- रोबोट के सामने कोई बाधा न होने पर बाएँ और दाएँ IR सेंसर के मूल्यों पर ध्यान दें। उदाहरण के लिए, उपरोक्त मामले में:
- L_High = __________
- R_High = __________
- जब आप अपने हाथ रोबोट के सामने रखते हैं तो बाएँ और दाएँ IR सेंसर के वैल्यू पर ध्यान दें:
- L_Low = __________
- R_Low = __________
- अगला, थ्रेशोल्ड मान प्राप्त करने के लिए औसत करें:
- L_T = (L_High + L_Low)/2 = __________
- R_T = (R_High + R_Low)/2 = __________

- इन वैल्यू को याद रखें।
- LED के माध्यम से प्रतिक्रिया प्राप्त करना: अब, यह जांचने के लिए कि क्या मान हमारे सेंसर के लिए ठीक काम करता है, आइए एक फीडबैक लूप जोड़ें, कुछ ऐसा जो इंगित करेगा कि सेंसर ने बाधा का पता लगा लिया है।
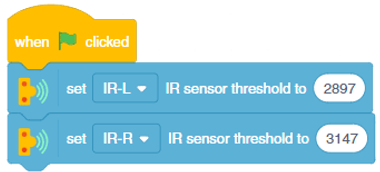
- Events से when flag clicked ब्लॉक जोड़ें
- Sensors पैलेट पर जाएं और दो set ( ) IR sensor thresholds to ( ) ब्लॉक जोड़ें और थ्रेशोल्ड वैल्यू लिखें जो आपने पहले पायी था।

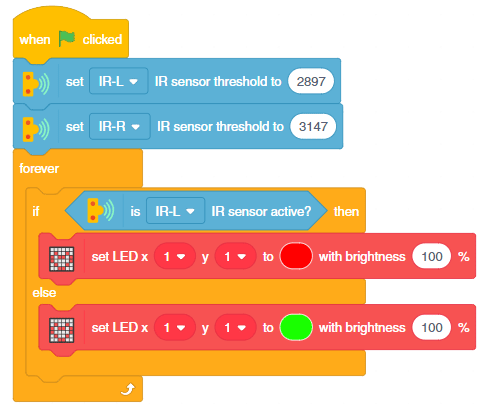
- अगला, नियंत्रण से forever ब्लॉक जोड़ें हम इस ब्लॉक का उपयोग कर रहे हैं क्योंकि हम यह जांचना चाहते हैं कि सेंसर लगातार लाइन का पता लगाता है या नहीं।

- फिर, forever एक if-else ब्लॉक जोड़ें
- अगला, Sensors पैलेट पर जाएं और एक is ( ) IR sensor active? if-else के सफेद स्थान के अंदर ब्लॉक करें बाधा का पता लगाने पर IR सेंसर सक्रिय हो जाएगा।
- यह इंगित (indicate) करने के लिए कि सेंसर सक्रिय है, डॉट मैट्रिक्स के LED में से एक को रोशन करें। Display पैलेट से, एक set LED x ( ) y ( ) to ( ) with brightness ( ) ब्लॉक के साथ जोड़ें if-else की if arm के नीचे ब्लॉक पर कलर सर्कल पर क्लिक करके ड्रॉप-डाउन से रंग को RED के रूप में सेट करें .
- ब्लॉक को डुप्लिकेट करें और इसे if-else की else arm के नीचे छोड़ दें, रंग को GREEN के रूप में सेट करें।
- if ब्लॉक को डुप्लिकेट करें और सेंसर को IR-R में बदलें।
- प्रोग्राम चलाएं और कोड का परीक्षण करें।

Activity 3: Making a Robot-Pet
एक पालतू रोबोट बनाएं जो हाथों से लाड़ प्यार करने पर प्रतिक्रिया करता है। रोबोट IR सेंसर का उपयोग करके छेड़छाड़ का पता लगा सकता है और तदनुसार कार्य कर सकता है।
इसका उद्देश्य रोबोट को हाथ का पता चलने पर कुछ क्रियाओं को निष्पादित करना है:
- जब बाएँ सेंसर पर हाथ का पता चलता है, तो बाएँ मुड़ें।
- जब दाएँ सेंसर पर हाथ का पता चलता है, तो दाएँ मुड़ें।
- जब बाएँ और दाएँ दोनों सेंसर पर हाथ का पता चलता है, तो Quarky का परिचय दें और मुस्कुराएँ।
- जब कुछ पता न चले तो कुछ न करें।
Coding Steps
नीचे दिए गए स्टेप्स का पालन करें:
- PictoBlox ऐप खोलें, My Spac पर जाएं, और एक नई फ़ाइल बनाने के लिए + बटन पर क्लिक करें।
- Quarky को PictoBlox से कनेक्ट करें।
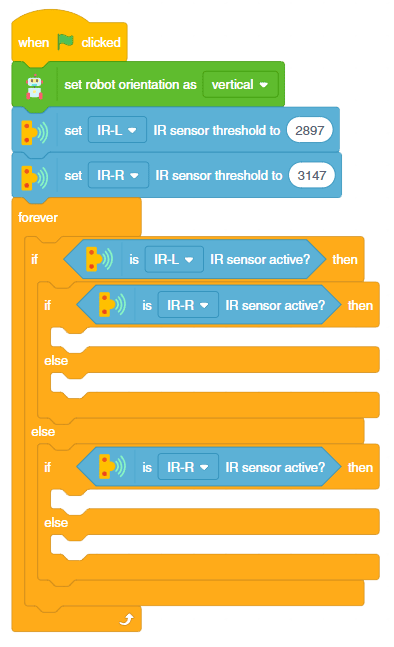
- Events से when flag clicked ब्लॉक जोड़ें
- Sensors पैलेट पर जाएं और two set ( ) IR sensor thresholds to ( ) ब्लॉक जोड़ें और अंतिम गतिविधि में आपके द्वारा पाया गया थ्रेशोल्ड वैल्यू लिखें।
- set robot orientation as ( ) ब्लॉक के रूप में जोड़ें और ओरिएंटेशन को vertical के रूप में सेट करें।
- अगला, नियंत्रण से forever ब्लॉक जोड़ें हम इस ब्लॉक का उपयोग कर रहे हैं क्योंकि हम यह जांचना चाहते हैं कि सेंसर लगातार लाइन का पता लगाता है या नहीं।
- फिर, forever ब्लॉक के अंदर एक if-else ब्लॉक जोड़ें
- अगला, Sensors पैलेट पर जाएं और एक is () IR sensor active? ब्लॉक को if-else के सफेद स्थान के अंदर डाले
- if ब्लॉक को डुप्लिकेट करें और if ब्लॉक की दो शाखाओं के अंदर डालें। वैल्यू को IR-L में बदलें।

- अब हमारे पास चार शाखाएँ हैं जो सभी चार स्थितियों का संकेत देती हैं। आइए एक-एक करके इसके बारे में जानें।
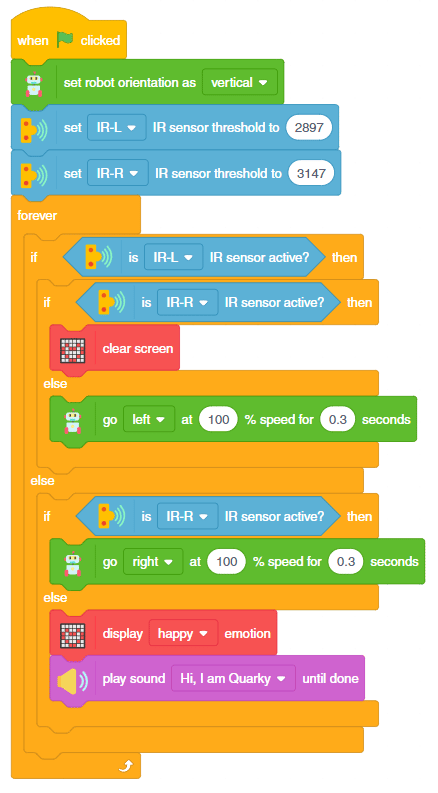
- पहला मामला तब होता है जब किसी हाथ का पता नहीं चलता। Display से एक clear screen ब्लॉक जोड़ें
- दूसरा मामला तब होता है जब IR-R सेंसर हाथ का पता लगाता है। इस स्थिति में, रोबोट बाएँ मुड़ जाएगा। Robot पैलेट से go ( ) at ( ) % speed for ( ) seconds ब्लॉक जोड़ें, दिशा को बाईं ओर और समय को 0.3 सेकंड पर सेट करें।
- तीसरा मामला तब होता है जब IR-L सेंसर हाथ का पता लगाता है। इस स्थिति में, रोबोट दाहिनी ओर मुड़ जाएगा। Robot पैलेट से go ( ) at ( ) % speed for ( ) seconds ब्लॉक जोड़ें, दिशा को दाईं ओर और समय को 0.3 सेकंड पर सेट करें।
- अंत में, दोनों सेंसर हाथ का पता लगाते हैं। रोबोट को मुस्कुराएं और ध्वनि बजाएं – Hi, I am Quarky, उसस्के लिए हम play sound ( ) until done ब्लॉक का इस्तेमाल करेंगे
- कोड पूरा हो गया है। इसे चलाएं और इसका परीक्षण करें। फ़ाइल को Robo Pet नाम में सहेजें।
Activity 3: Output
अगले पाठ पर जाने से पहले सुनिश्चित करें कि आपने assignment पूरा कर लिया है और सबमिट कर दिया है, साथ ही quiz में भाग लें।