Introduction to Robotics
एक रोबोट , सरल शब्दों में, कोई भी मशीन है जिसे किसी कार्य को करने के लिए डिज़ाइन किया गया है। इससे आप कहेंगे, “तो, एक कैलकुलेटर, एक पीसी, एक वैक्यूम क्लीनर – ये सब भी रोबोट हैं?” बिल्कुल नहीं। रोबोट ऐसी मशीनें हैं जो निर्णय लेने और कार्यों को करने के लिए प्रोग्रामिंग का उपयोग करती हैं।
उदाहरण के लिए पेचकश एक मशीन है क्योंकि यह पेंच को कसने का कार्य करता है और मानव प्रयास को कम करता है। लेकिन यह कोई रोबोट नहीं है। अगर हम इसे एक रोबोटिक आर्म से जोड़ दें तो पूरी चीज को रोबोट कहा जा सकता है।

Advantages of Robots
- रोबोट कभी नहीं थकते। वे बिना किसी ब्रेक या छुट्टियों के समान गति के साथ समान गति से काम कर सकते हैं।
- वे तब उपयोगी होते हैं जब आपको किसी विशेष कार्य को बिना ऊबे बार-बार करने की आवश्यकता होती है। यह हमें उन कार्यों में अपनी पूरी क्षमता का उपयोग करने में सक्षम बनाता है जो केवल मनुष्य ही कर सकते हैं।
- रोबोट तेज हैं । ये कम समय में बहुत से काम कर सकते हैं। यह, बदले में, समय बचाने में मदद करता है।

- चूंकि रोबोट कम अवधि में अधिक मात्रा में काम कर सकते हैं, इसलिए समग्र उत्पादन बढ़ जाता है।
- रोबोट का उपयोग उन कार्यों को करने के लिए किया जा सकता है जो एक सामान्य इंसान के लिए खतरनाक हो सकते हैं। वे बिना किसी नुकसान के डर के खतरनाक वातावरण में भी काम कर सकते हैं।
- रोबोट मनुष्यों की तुलना में अधिक सटीकता और गुणवत्ता के साथ कार्य कर सकते हैं।
Applications
हमें कई क्षेत्रों में रोबोट मिल सकते हैं – अपने घर की सफाई से लेकर मंगल ग्रह पर जन्मदिन मनाने तक। मज़ाक के अलावा, आधुनिक दुनिया में, रोबोटों ने लगभग हर क्षेत्र में जगह बना ली है। उनके कुछ अंतहीन अनुप्रयोग नीचे दिए गए हैं:
उद्योग: सामग्री को एक स्थान से दूसरे स्थान पर ले जाने के लिए और पेंटिंग, निर्माण, वेल्डिंग आदि जैसे अन्य उद्देश्यों के लिए।
अंतरिक्ष: बाहरी अंतरिक्ष की खोज के लिए। जैसे, क्यूरियोसिटी रोवर
अस्पताल: सर्जिकल रोबोट, पुनर्वास रोबोट, फार्मेसी रोबोट, आदि।
परिवहन: स्व-ड्राइविंग कार, माल और सेवाओं का परिवहन, आदि।
कृषि: सब्जी और फल चुनने जैसे कार्यों के लिए।
सेना: बम गिराने वाले रोबोट, ड्रोन अन्वेषण आदि।परिवार: खाना पकाने, सफाई और धुलाई के प्रयोजनों के लिए।मनोरंजन: ह्यूमनॉइड्स, रोबोट डॉग्स, मोबाइल फोन, कंप्यूटर आदि। जैसे Aibo रोबोट कुत्ता।

Activity 1: Making Quarky Move
अपने रोबोट को आगे, बाएँ, दाएँ और पीछे ले जाएँ।
Coding Steps
नीचे दिए गए स्टेप्स का पालन करें:
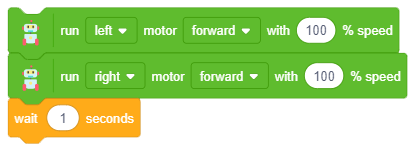
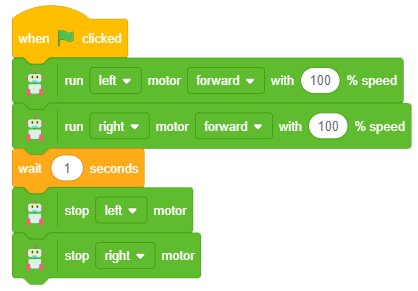
PictoBlox ऐपखोलें,My Spaceपर जाएं, और एक नई फ़ाइल बनाने के लिए+बटन पर क्लिक करें।QuarkyकोPictoBloxसे कनेक्ट करें।Forward Movement: चलिए रोबोट को 1 सेकंड के लिए आगे चलाने के लिए स्क्रिप्ट बनाते हैं और फिर रुक जाते हैं। अगर रोबोट के दोनों पहिए आगे की दिशा में घूमेंगे तो वह आगे बढ़ेगा। यह समझ में आता है, है ना?
- सबसे पहले,
Robotपैलेट पर जाएं और run ( ) motor ( ) with ( ) speed जोड़ें, left मोटर का चयन करें, गति की forward दिशा, और 100% गति को डिफ़ॉल्ट मान के रूप में सेट किया गया है। - अब, run ( ) motor ( ) with ( ) speed ब्लॉक को कॉपी करें और इसे पहले वाले के नीचे जोड़ें। ड्रॉपडाउन से right मोटर का चयन करें।
- अगला, Control पैलेट से एक wait ( ) seconds ब्लॉक जोड़ें और प्रतीक्षा समय को 1 सेकंड के रूप में सेट करें।

Eventsपैलेट से when flag clicked ब्लॉक को स्क्रिप्टिंग क्षेत्र में ड्रैग और ड्रॉप करें।- अगला, wait ( ) seconds ब्लॉक के नीचे Robot पैलेट से एक stop ( ) motor ब्लॉक जोड़ें और विकल्प के रूप में left का चयन करें।
- अगला, Robot पैलेट से एक और stop ( ) motor ब्लॉक जोड़ें और विकल्प के रूप में right चुनें।

- अब, green flag पर क्लिक करके स्क्रिप्ट चलाएँ।
- सबसे पहले,
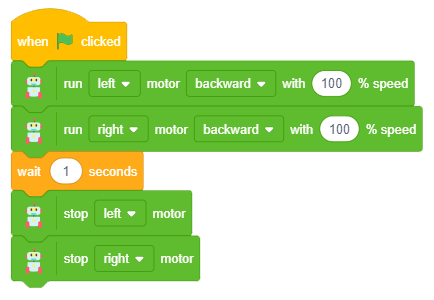
Backward Movement: यदि दोनों पहिए पीछे की दिशा में घूमते हैं तो रोबोट पीछे की ओर गति करेगा। रोबोट को 1 सेकंड के लिए पीछे की ओर चलाने और फिर रुकने के लिए उपरोक्त स्क्रिप्ट को रूपांतरित करें।
- पहले run ( ) motor ( ) with ( ) speed strong ब्लॉक को backward दिशा बदलें। इससे बायां मोटर पीछे की ओर जाएगा।
- दूसरे run ( ) motor ( ) with ( ) speed ब्लॉक को backward दिशा बदलें। इससे दाहिनी मोटर पीछे चली जाएगी।

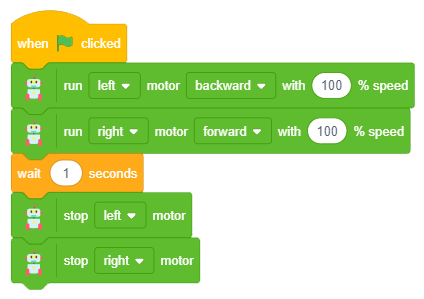
Left Movement: रोबोट को बाएँ और दाएँ घुमाना मुश्किल हिस्सा है। Quarky को बायीं ओर घुमाने के लिए उसका दाहिना पहिया आगे की दिशा में घूमना चाहिए लेकिन उसका बायां पहिया पीछे की दिशा में घूमना चाहिए। रोबोट को 1 सेकंड के लिए बाईं ओर चलाने और फिर रुकने के लिए उपरोक्त स्क्रिप्ट को रूपांतरित करें।
- पहले run ( ) motor ( ) with ( ) speed ब्लॉक को backward दिशा बदलें। इससे बायां मोटर पीछे की ओर जाएगा।
- दूसरे run ( ) motor ( ) with ( ) speed ब्लॉक को forward के लिए दिशा बदलें। इससे दाहिनी मोटर आगे जाएगी।
Right Movement: दूसरी तरफ Quarky को राइट टर्न कराने के लिए उसका बायां पहिया आगे की दिशा में घूमना चाहिए और राइट व्हील पीछे की दिशा में घूमना चाहिए। रोबोट को 1 सेकंड के लिए बाईं ओर चलाने और फिर रुकने के लिए उपरोक्त स्क्रिप्ट को रूपांतरित करें।
- पहले run ( ) motor ( ) with ( ) speed ब्लॉक को forward दिशा में बढ़ाएं । इससे बायां मोटर आगे जाएगा।
- दूसरे run ( ) motor ( ) with ( ) speed ब्लॉक को backward की ओर दिशा बदलें। इससे दाहिनी मोटर पीछे चली जाएगी।



Activity 2: Wirelessly Controlled Robot
चाबियों के साथ अपने रोबोट को आगे, बाएँ, दाएँ और पीछे ले जाएँ।
Logic
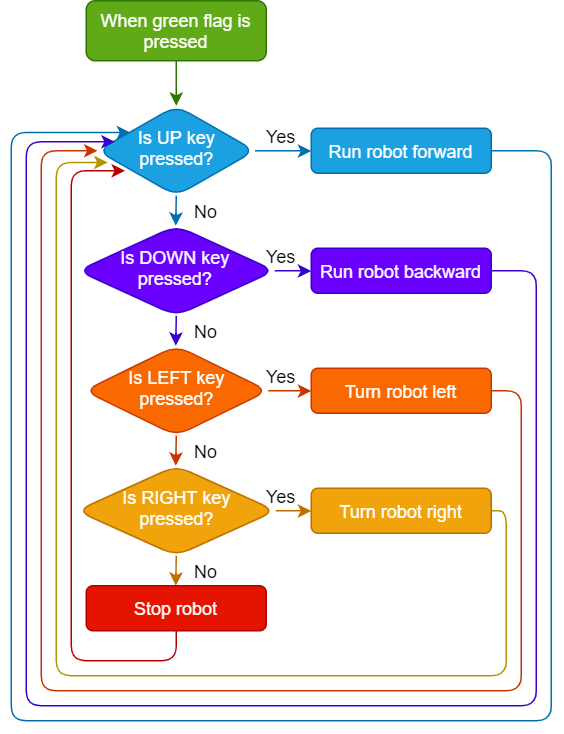
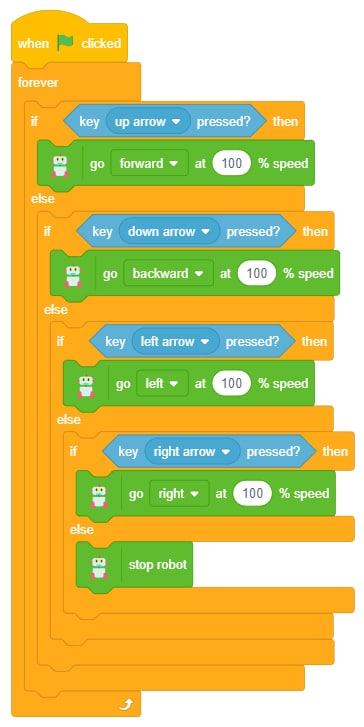
हम आपके डेस्कटॉप/PictoBlox मोबाइल ऐप के कीबोर्ड की तीर (keys) कुंजियों का उपयोग करके Quarky को वायरलेस तरीके से नियंत्रित करने जा रहे हैं।
- up arrow की का उपयोग करके, हम Quarky को आगे बढ़ाएंगे।
- down arrow key का प्रयोग करके, हम इसे पीछे की ओर ले जाएंगे।
- right arrow key का उपयोग करके, यह दाएँ चलेगा।
- left arrow key का उपयोग करके, यह बाएँ चलेगा।
- जब कोई भी तीर कुंजी नहीं दबाई जाती है, तो Quarky को हिलना बंद कर देना चाहिए।

Coding Steps
नीचे दिए गए स्टेप्स का पालन करें:
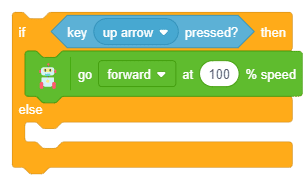
PictoBlox ऐपखोलें,My Spaceपर जाएं और एक नई फ़ाइल बनाने के लिए+बटन पर क्लिक करें।QuarkyकोPictoBloxसे कनेक्ट करें।- हम यह सुनिश्चित करना चाहते हैं कि Quarky तभी आगे बढ़े जब ऊपर तीर कुंजी को दबाया जाए। यह जाँचने के लिए कि क्या यह दबाया गया है, हम एक if ब्लॉक का उपयोग करने जा रहे हैं।
Controlपटल पर जाएं और एक if-else ब्लॉक को खींचें और छोड़ें। - अब,
Sensingपैलेट पर जाएं और एक key ( ) pressed? ब्लॉक को if ब्लॉक के हीरे के आकार की जगह के अंदर डाले। यह ब्लॉक जाँच करेगा कि चयनित कुंजी दबाई गई है या नहीं। up arrow key डिफ़ॉल्ट विकल्प है। Robotपैलेट पर जाएं और if ब्लॉक के अंदर go ( ) at ( ) % speed for ( ) second ब्लॉक जोड़ें। अब, हमें शेष तीन दिशाओं के लिए भी ऐसा ही करने की आवश्यकता है।
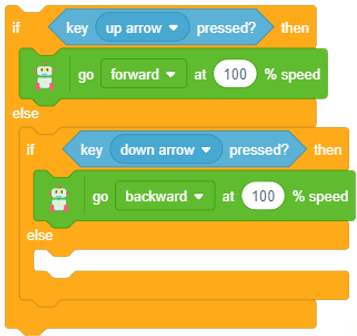
- if-else ब्लॉक पर राइट-क्लिक करके इन ब्लॉक्स को डुप्लिकेट करें। फिर, key ( ) pressed ? ब्लॉक करें, कुंजी को डाउन में बदलें और go ( ) at ( ) % speed for ( ) second ब्लॉक, दिशा को पीछे की ओर बदलें।

- शेष दो दिशाओं के लिए चरण 6 को दो बार और दोहराएं।
- अब stop robot ब्लॉक को आखिरी और ब्रांच में रखें।
- शीर्ष पर forever और when flag clicked ब्लॉक जोड़कर स्क्रिप्ट को पूरा करें।

- अब, green flag पर क्लिक करके स्क्रिप्ट चलाएँ।
- फ़ाइल को
Wirelessly Controlled Robotनाम से सहेजें।
Activity 2: Output
अगले पाठ पर जाने से पहले सुनिश्चित करें कि आपने assignment पूरा कर लिया है और सबमिट कर दिया है, साथ ही quiz में भाग लें।