
सभी के बारे में – एज डिटेक्टर रोबोट
जैसा कि नाम से पता चलता है, एज डिटेक्शन रोबोट एक बुद्धिमान उपकरण है जो किसी सतह के किनारे या अनुपस्थिति का पता लगाता है और खुद को गिरने से बचाने के लिए इसे अलग-अलग दिशाओं में घुमाकर टालता है। उदाहरण के लिए, एक स्वायत्त रोबोट कार चट्टानों से गिरने से बचने के लिए एज डिटेक्शन तकनीक का उपयोग करती है।
एज डिटेक्शन रोबोट किनारे का पता लगाता है और एक ऐसे रास्ते पर आगे बढ़ता है जहां सेंसर और सतह के बीच की दूरी 10 सेमी से कम होती है।
रोबोट की असेंबली
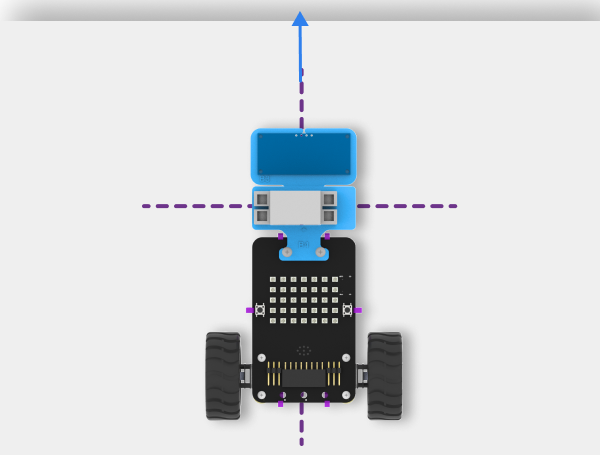
चलो रोबोट बनाते हैं। हम असेंबली की शुरुआत के संदर्भ में हॉरिजॉन्टल रोबोट ले रहे हैं।
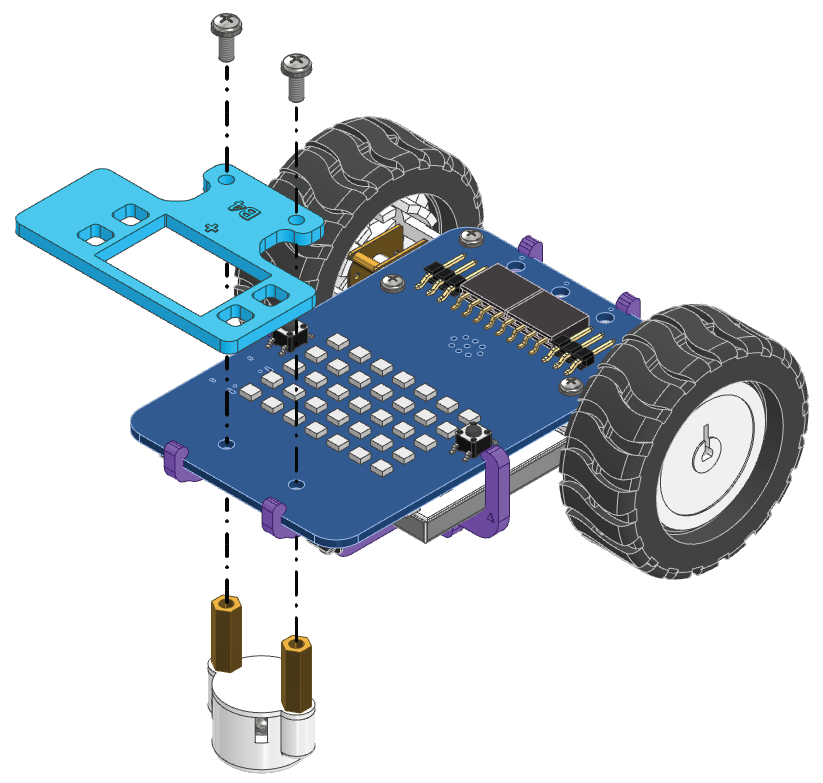
- सबसे पहले, बोल्ट को हटाकर कैस्टर व्हील को क्वार्की रोबोट से अलग करें ।

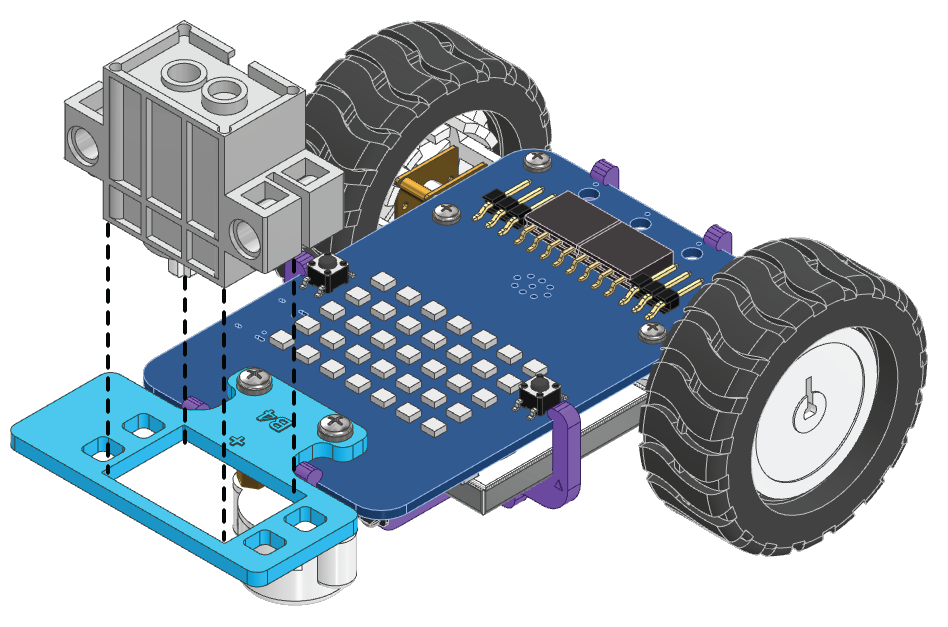
- फिर, संलग्न करें एक ही बोल्ट का उपयोग करके बी 4 प्लेट और कैस्टर व्हील दोनों।

- B4 प्लेट में सर्वो मोटर को पुश-फिट करें जैसे कि शाफ्ट नीचे की ओर हो और ‘+’ चिह्न इसके साथ संरेखित हो।

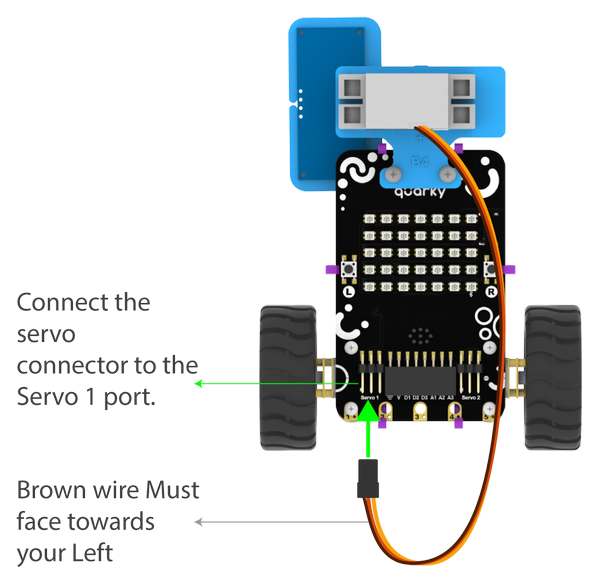
- सर्वो मोटर को क्वार्की से कनेक्ट करें।

- पिक्टोब्लॉक्स खोलें और सर्वो मोटर कोण को 90 डिग्री पर सेट करें। सर्वो हेड ठीक से संरेखित होना चाहिए।

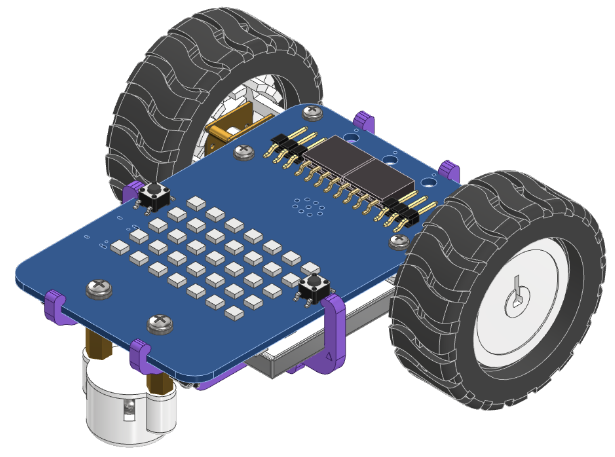
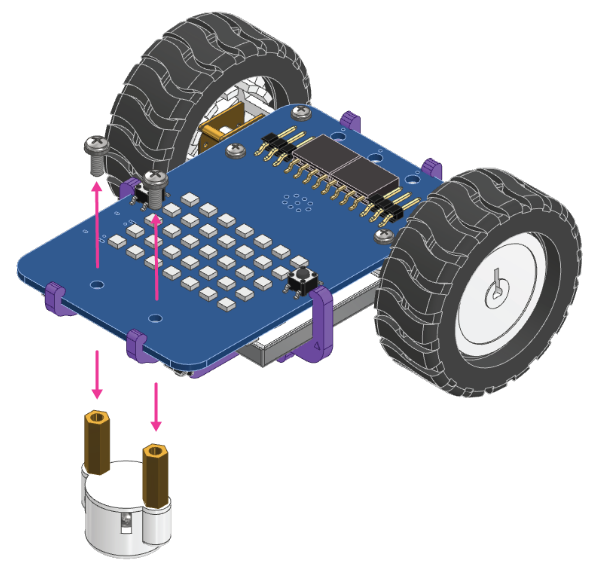
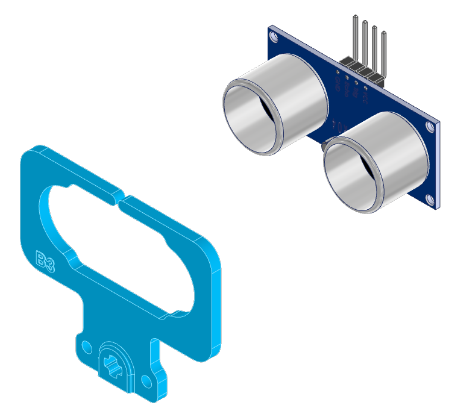
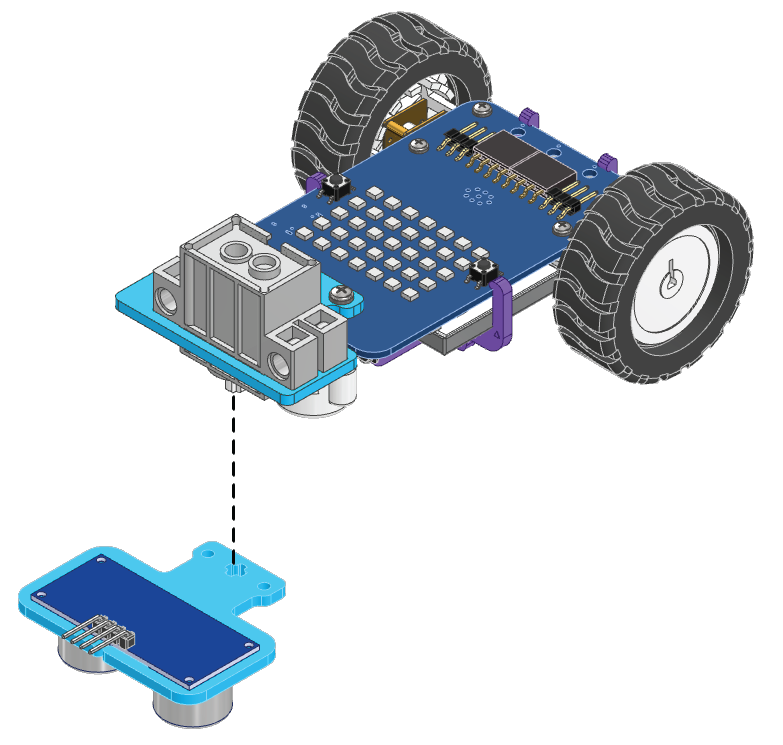
- अल्ट्रासोनिक सेंसर को B8 प्लेट में पुश-फिट करें ।

- अल्ट्रासोनिक सेंसर को नीचे की ओर रखते हुए B8 प्लेट को सर्वो मोटर शाफ्ट में पुश-फिट करें ।

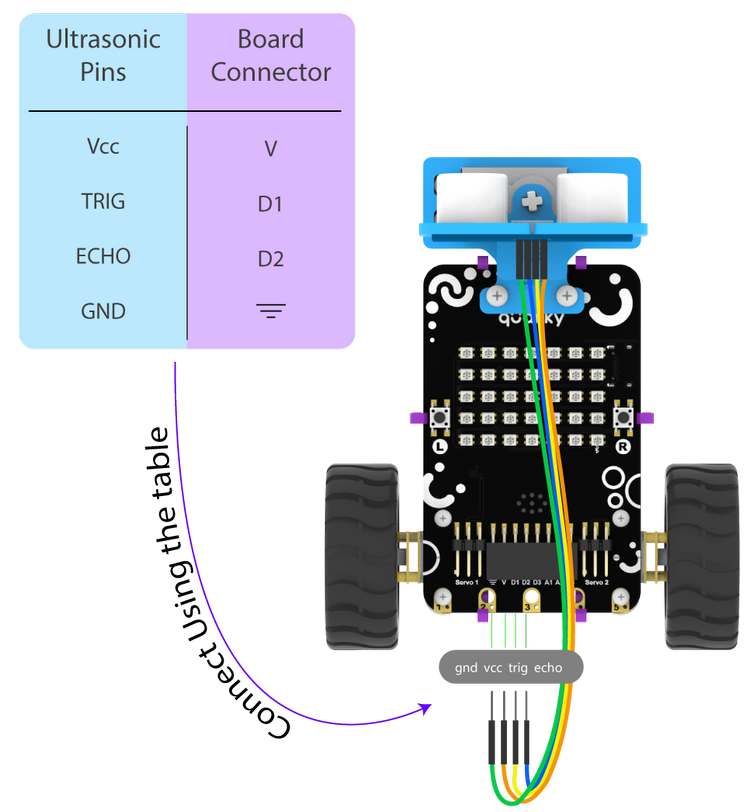
- अल्ट्रासोनिक सेंसर को क्वार्की रोबोट से कनेक्ट करें।


असेंबली पूरी हो गई है.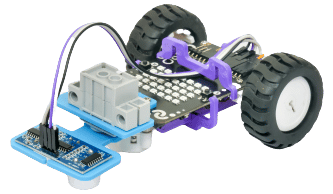
तर्क और फ़्लोचार्ट
गिरने से बचने के लिए, सेंसर और सतह के बीच की दूरी की गणना करके हमारा रोबोट जब भी किनारे का पता लगाएगा, अपना रास्ता बदल देगा। आइए लॉगिन को विस्तार से देखें:
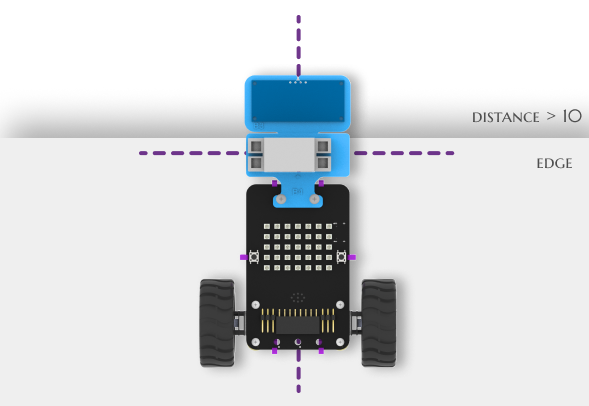
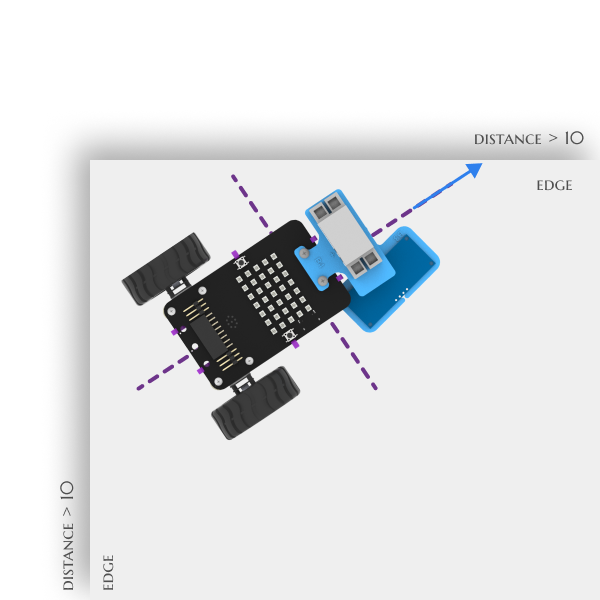
चरण 1 : अल्ट्रासोनिक सेंसर और सतह के बीच की दूरी 10 सेमी से कम होने पर हमारा एज डिटेक्टर आगे बढ़ेगा।
चरण 2 : किनारे का पता तब चलता है जब अल्ट्रासोनिक सेंसर और सतह के बीच की दूरी 10 सेमी से अधिक होती है। रोबोट किनारे का पता लगाना बंद कर देता है।
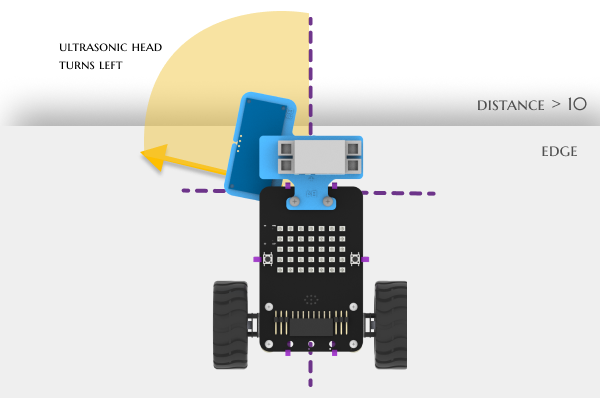
चरण 3 : अल्ट्रासोनिक सिर यह जांचने के लिए बाईं ओर मुड़ता है कि बाईं ओर कोई किनारा है या नहीं।
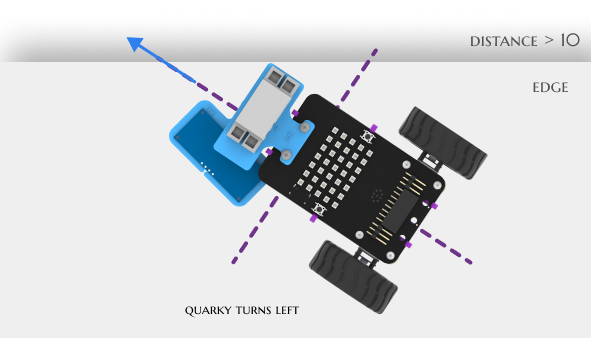
चरण 4 : यदि बायीं ओर कोई किनारा नहीं है, तो क्वार्की 90 डिग्री बायें मुड़कर अपनी दिशा बायीं ओर बदलेगा। अल्ट्रासोनिक सिर सीधे हो जाएगा। और रोबोट आगे बढ़ता है।
चरण 5 : यदि बाईं ओर कोई किनारा पाया जाता है, तो अल्ट्रासोनिक सिर दाईं ओर मुड़ जाता है।
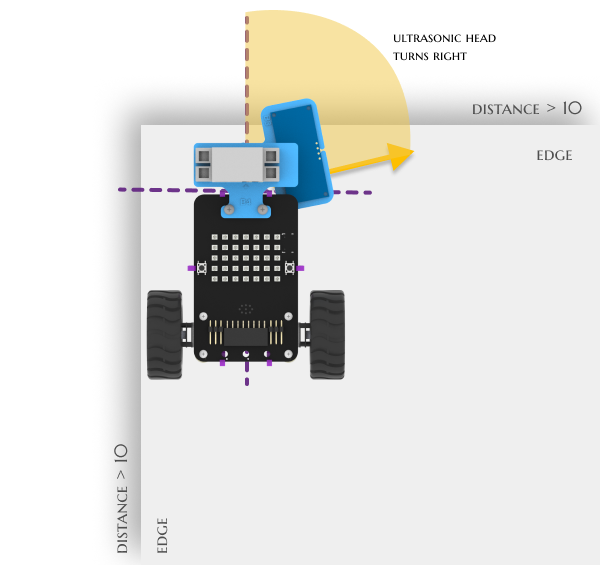
चरण 6 : यदि कोई किनारा नहीं मिलता है, तो क्वार्की दाएँ मुड़कर अपनी दिशा को दाईं ओर बदलता है। अल्ट्रासोनिक सिर सीधे हो जाएगा। और आगे बढ़ता है।
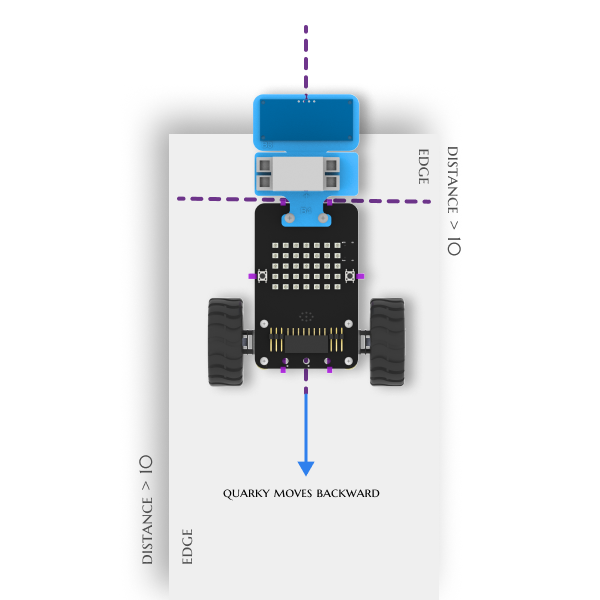
चरण 7 : यदि यह सभी दिशाओं में किनारों का पता लगाता है। क्वार्की पीछे हटेगा।
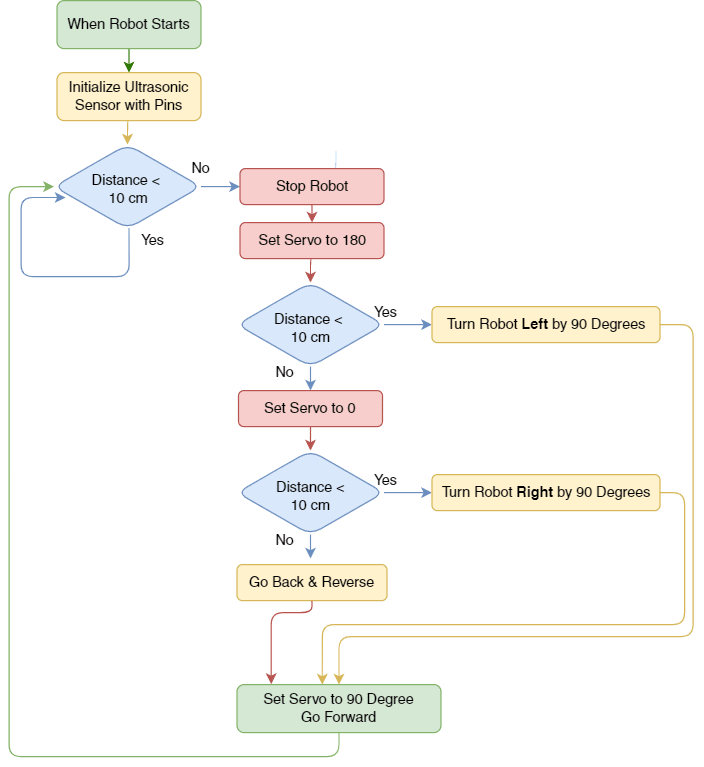
Logic Flowchart
नीचे हमारे तर्क का फ़्लोचार्ट प्रतिनिधित्व है।
Coding Steps
नीचे दिए गए स्टेप्स का पालन करें:
- PictoBlox ऐप में एक नई फाइल बनाएं।
QuarkyकोPictoBloxसे कनेक्ट करें।- रोबोट को इनिशियलाइज़ करें:
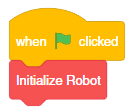
- Events पैलेट से when green flag clicked ब्लॉक को खींचें और छोड़ें।
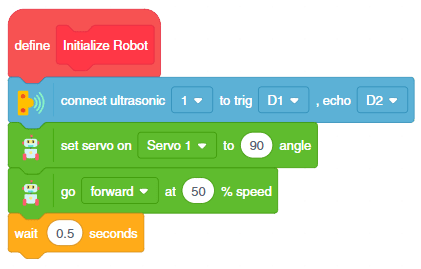
- नाम का एक ब्लॉक बनाएं – Initialize Robot ब्लॉक लगाएं।

- अब, पिन को इनिशियलाइज़ करने के लिए
सेंसरपैलेट में जाएँ और इनिशियलाइज़ रोबोट हैट ब्लॉक के नीचे कनेक्ट अल्ट्रासोनिक () को ट्रिग (), इको () से जोड़ें । - अगला कदम शुरुआती सर्वो कोण को 90 डिग्री के रूप में सेट करना होगा, इसके लिए सेट सर्वो को
रोबोटपैलेट से () से () कोण पर खींचें और छोड़ें । - गो () एट () % स्पीड ब्लॉक जोड़ें। इस बार दिशा को आगे और गति को 50% के रूप में सेट करें। इससे रोबोट आगे बढ़ेगा।
- प्रतीक्षा करें () दूसरा नीचे जोड़ें- () पर () % गति से जाएं।

- एज का पता लगाना:
- अब,
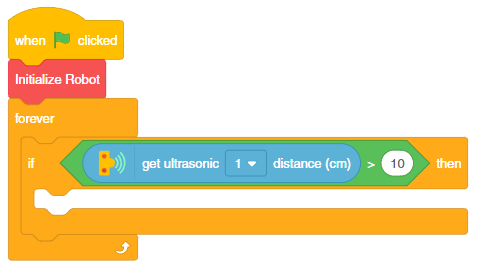
Controlपैलेट पर जाएं और Initialize Robot के नीचे forever ब्लॉक जोड़ें। - उसके बाद, forever ब्लॉक के अंदर
Controlपैलेट से if () then ब्लॉक रखे। - इसके बाद,
Operatorsपैलेट पर जाएं और ( ) > ( ) ब्लॉक if ( ) then की जगह के अंदर space में लगाए। - () के पहले स्थान के भीतर
सेंसरपैलेट से प्राप्त अल्ट्रासोनिक () दूरी ब्लॉक को खींचें और छोड़ें> () ब्लॉक और 10 दूसरी जगह में। यह ब्लॉक सेंसर वैल्यू की तुलना करने और किनारों का पता लगाने में मदद करेगा।
- अब,
- मुक्त क्षेत्र के लिए जाँच:
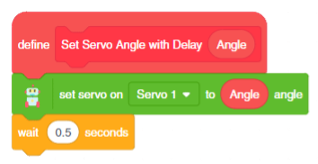
- इसके बाद, पैरामीटर के रूप में एंगल के साथ सेट सर्वो एंगल विथ डिले () ब्लॉक नाम का एक ब्लॉक कस्टम ब्लॉक बनाएं।
- Angle के रूप में कोण के साथ एक set servo ( ) to ( ) angle ब्लॉक रखें।
- उसके बाद प्रतीक्षा () सेकंड शुरू करके 0.5 सेकंड की देरी जोड़ें।

- main script पर वापस आएं।
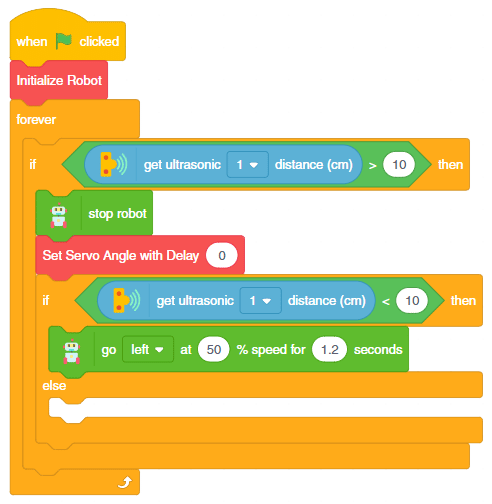
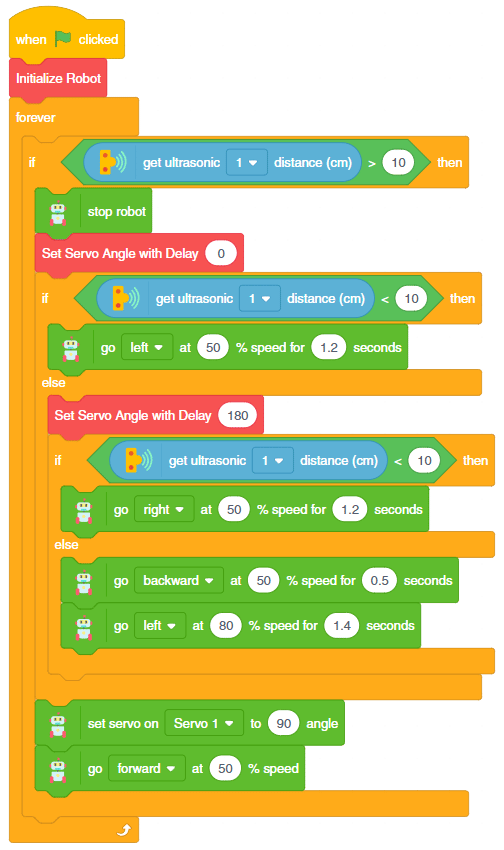
रोबोटपैलेट से स्टॉप रोबोट जोड़ें। 0 डिग्री के रूप में कोण सेट के साथ विलंब () ब्लॉक के साथ सेट सर्वो कोण जोड़ें। यह स्थिति रोबोट को रोक देगी और किनारे का पता चलने पर सर्वो के कोण को 0 डिग्री पर बदल देगी। - अब, हम if () को जोड़कर अधिकतम दूरी की जांच करेंगे और
कंट्रोलपैलेट से ब्लॉक कर देंगे । - इसके बाद,
ऑपरेटर्सपैलेट पर जाएं और () लगाएं< () if() के अंदर ब्लॉक करें तो और ब्लॉक करें। - () के पहले स्थान के भीतर
सेंसरपैलेट से प्राप्त अल्ट्रासोनिक () दूरी ब्लॉक को खींचें और छोड़ें< () ब्लॉक और 10 सेकंड में। - यदि शर्त पूरी हो जाती है, तो रोबोट को बाएँ मुड़ना चाहिए। इसे if स्टेटमेंट के अंदर () सेकंड ब्लॉक के लिए ()% स्पीड पर go () जोड़कर किया जा सकता है। गति को 50% और समय को 1.2 सेकंड के रूप में सेट करें।

- इसके बाद Set Servo Angle with Delay( ) ब्लॉक को डुप्लीकेट करें और इसे else ब्रांच में रखें। कोण को 180 डिग्री और रोबोट की दिशा को दाईं ओर बदलें।
- अन्य -ब्रांच के भीतर, () सेकेंड ब्लॉक के लिए ()% गति पर गो () जोड़ें। इस बार दिशा को पीछे की ओर, गति को 50% और समय को 0.5 सेकंड के रूप में सेट करें।
- () सेकंड ब्लॉक के लिए ()% गति पर एक और गो () जोड़ें। इस बार दिशा को बाईं ओर, गति को 80% और समय को 1.4 सेकंड के रूप में सेट करें। इससे रोबोट उल्टा जाएगा।
- अगला, अगर हमारे रोबोट को कोई बढ़त नहीं मिलती है, तो उसे आगे बढ़ना चाहिए। इसलिए सर्वो () को पहले if शाखा के अंत में () कोण ब्लॉक में रखें। कोण को 90 डिग्री पर सेट करें।
- अंत में, गो () को () गति () ब्लॉक पर रखें। ड्रॉपडाउन से, दिशा को forward के रूप में और गति को 50% के रूप में चुनें।

- अंत में, हमारा रोबोट चलने के लिए तैयार है! रोबोट को चलाएं और जांचें कि क्या यह ठीक से काम कर रहा है।

- फ़ाइल को
एज अवॉइडेंसके रूप में सहेजें।
अगले पाठ पर जाने से पहले सुनिश्चित करें कि आपने assignment पूरा कर लिया है और उसे सबमिट कर दिया है, साथ ही quiz में भाग लें।