Knowledge Box
Robot पैलेट में, आपको go ( ) at ( ) % speed for ( ) seconds नाम का एक ब्लॉक मिलेगा। इस ब्लॉक का उपयोग करके, आप हर बार अलग-अलग मोटरों के लिए ब्लॉक का उपयोग करने के बजाय पूरे रोबोट को आगे, पीछे, बाएँ या दाएँ घुमा सकते हैं।
Activity 1: Making a Square
 अब, रोबोट के साथ थोड़ी मस्ती करने का समय आ गया है! चलिए Quarky को एक वर्ग बनाते हैं।
अब, रोबोट के साथ थोड़ी मस्ती करने का समय आ गया है! चलिए Quarky को एक वर्ग बनाते हैं।
Coding Steps
नीचे दिए गए स्टेप्स का पालन करें:
- PictoBlox ऐप खोलें, My Space पर जाएं, और एक नई फ़ाइल बनाने के लिए + बटन पर क्लिक करें।
- Quarky को PictoBlox से कनेक्ट करें।
- आपको Quarky को 90° बाएँ मुड़ना है। युक्ति समय को समायोजित करना है।


- आपको निम्नलिखित स्थितियों की जांच करनी होगी:
- Overshoot : आपका समय अधिक है। उसका वैल्यू घटाओ।
- Undershoot : आपका समय कम है। उसका वैल्यू बढ़ाओ।
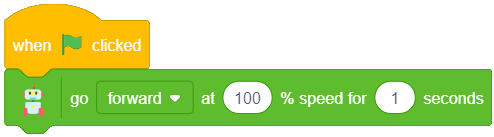
- Robot पैलेट पर जाएं और go ( ) at ( ) % speed for ( ) second जोड़ें। गति की forward दिशा, 100% गति और 1 सेकंड को डिफ़ॉल्ट वैल्यू के रूप में सेट किया गया है।
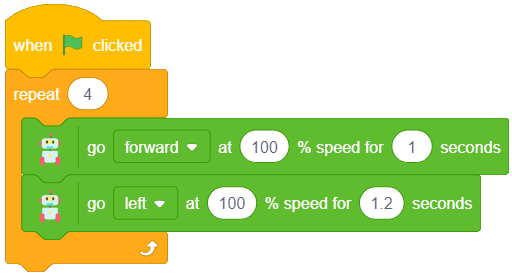
- फिर, go ( ) at ( ) % speed for ( ) second जोड़ें और दिशा को left ओर बदलें। याद है 90° बाएँ व्यायाम जो हमने ऊपर किया था? आपको उस व्यायाम के दौरान मिले टर्निंग टाइम का ही उपयोग करना चाहिए। अब तक, हमने Quarky को केवल एक बार आगे बढ़ने और बाएँ मुड़ने के लिए तैयार किया है। एक वर्ग बनाने के लिए, उसे इन चरणों को तीन बार और दोहराना होगा।
- Control पैलेट से repeat ( ) ब्लॉक जोड़ें और स्पेस में 4 लिखें। इसका मतलब है कि repeat ( ) ब्लॉक के अंदर के सभी ब्लॉक 4 बार चलेंगे।
- दोनों go ( ) at ( ) % speed for ( ) second ब्लॉक को repeat ( ) के अंदर जोड़ें
- शीर्ष पर when flag clicked ब्लॉक जोड़कर स्क्रिप्ट को पूरा करें।

- अब, green flag पर क्लिक करके स्क्रिप्ट चलाएँ !
- फ़ाइल को स्क्वायर रोबोट के रूप में सहेजें।
Activity 1: Output
Challenge
रोबोट का उपयोग करके एक त्रिभुज का आकार बनाएं।
Activity 2: Moving in a Circle
अब, रोबोट के साथ थोड़ी मस्ती करने का समय आ गया है! चलिए Quarky को एक वृत्त बनाते हैं।
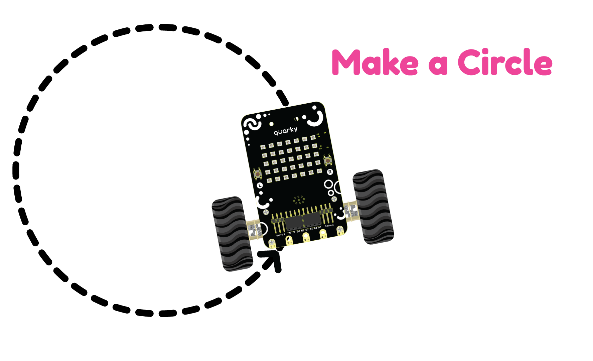
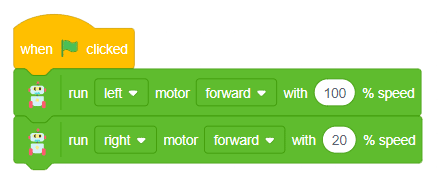
अब तक हम केवल रोबोट को चलाने के लिए मोटरों की दिशा पर ध्यान केंद्रित कर रहे थे। लेकिन जब हमें रोबोट को एक घेरे में घुमाना है, तो हमें उस गति पर विचार करना होगा जिस पर दोनों पहिए चल रहे हैं। उदाहरण के लिए, रोबोट को वामावर्त दिशा में एक चक्र में घुमाने के लिए, हमें निम्नलिखित शर्तों को बनाए रखना होगा:
- दोनों पहिए आगे की दिशा में चल रहे हैं।
- बाएँ पहिये की गति दाएँ पहिये की गति से कम होनी चाहिए।
Coding Steps
नीचे दिए गए स्टेप्स का पालन करें:
- PictoBlox ऐप खोलें, My Space पर जाएं और एक नई फ़ाइल बनाने के लिए + बटन पर क्लिक करें।
- Quarky को PictoBlox से कनेक्ट करें।
- इस अवधारणा को लागू करने के लिए, हमें अलग-अलग मोटरों को नियंत्रित करना होगा।

- सर्कल की त्रिज्या को नियंत्रित करने के लिए मोटर की गति को बदलने की जरूरत है। यदि मोटर की गति के बीच का अंतर अधिक है तो त्रिज्या कम होगी और यदि अंतर कम है तो त्रिज्या बड़ी होगी।
- क्लॉकवाइज घूमने वाला रोबोट भी बनाने की कोशिश करें।
Activity 2: Output
अगले पाठ पर जाने से पहले सुनिश्चित करें कि आपने assignment पूरा कर लिया है और सबमिट कर दिया है, साथ ही quiz में भाग लें।